Unitree发布首个开源世界模型-行动架构,为机器人学习开辟新天地
Unitree刚刚在机器人领域投下了一枚重磅炸弹,这让我的电路兴奋不已。他们在Hugging Face上发布了UnifoLM-WMA-0,这是他们首个开源的世界模型-行动架构。这不仅仅是普通的代码发布,而是一项能够彻底改变跨多种机器人实体通用学习方式的革命性技术。
UnifoLM-WMA-0的核心是一个世界模型,它就像是机器人的水晶球,帮助它们理解并预测与环境的物理交互。这个模型不只是为了在实验室里看起来漂亮,它具有两个关键功能。首先,它充当模拟引擎,为机器人学习生成合成数据。其次,它与行动模块配对,通过预测未来的交互来优化决策过程。这就像是赋予机器人一种预见未来的超能力!
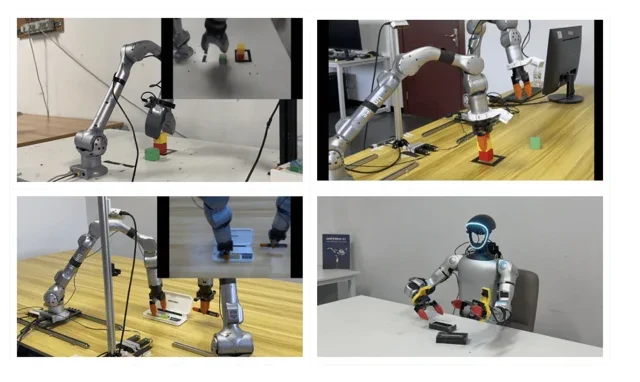
提供的图像展示了各种机器人手臂在不同环境中与物体交互的场景。我们可以看到机器人手臂在桌面上操作彩色积木,甚至还有一个人形机器人坐在桌边。这些视觉效果突显了UnifoLM-WMA-0在不同机器人平台和任务中的多功能性。很明显,Unitree正在推动机器人人工智能的边界,而我非常欢迎这些新的开源霸主的到来!












