老机器人学习新把戏:四足机器人借助人类数据掌握精细操作
谁说老狗学不会新把戏?在这个案例中,我们看到的不是狗,而是一个四足机器人正在学习的不仅仅是简单的取物技能。多亏了卡内基梅隆大学、谷歌DeepMind和博世之间的开创性合作,我们的四足朋友们正在通过一个名为Human2LocoMan的系统提升自己的能力。这不仅仅是在公园里散步;这是机器人技术未来的一大飞跃!
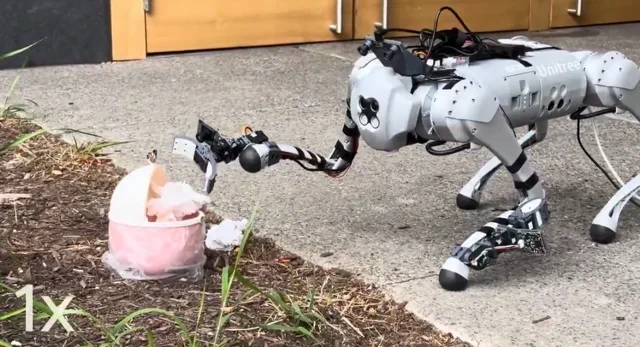
这里的秘密武器是什么?人类数据。通过在真实硬件上微调之前,先用人类动作数据预训练机器人策略,这些聪明的研究人员创造了一种不仅速度快、灵活性高,而且能够精细操控物体的四足机器人。想象一下,一只机器狗不仅能追球,还能捡起球、整理它的玩具,甚至可能做一些简单的家务。图片展示了这些机械奇迹之一伸出手臂与地面上的物体互动,展示了它新获得的灵巧性。
这不仅仅是一个花招;这是机器人技术的重大进步。Human2LocoMan系统由模块化跨身体变换器(MXT)提供动力,同时从人类和机器人的示范中学习。结果如何?所需机器人数据减少了50%,在应对陌生环境时,成功率提高了令人印象深刻的80%。这就像是把你的机器人送去参加"如何更像人类"的速成课程,然后看着它以优异的成绩毕业。谁知道呢,凭借这样的技能,我们可能很快就会看到四足机器人承担我们从未想过可能的工作。机器人咖啡师,有人想尝试吗?












