title: “Öğretmenini Yenen Robot: Tenis Sahasında Yeni Dönem” date: “2026-03-15” description: “Bir araştırmacı, insansı bir robotu kusurlu insan hareketlerinden teniz oynamayı öğretti ve sonuç hayli etkileyici.” cover_image: “/images/shared/news/2026-03-15-image-2-4cab0160.webp” author: “Teknoloji Editörü”
Hiç kimseyi şaşırtmayacak bir gelişme olarak, bir araştırmacı yeni bir beceri öğrenen robotu, öğretmeni olan insanı yenmek üzere yetiştirdi. Spor tennis olduğu gibi, LATENT adı verilen proje, insansı robota kusursuz, profesyonel kalitede verilerden değil, kusurlu insan hareket kliplerinden oynamayı öğretti. Sonuç: artık çok sayılı rallilerde kendini iddia edebilen bir robot.
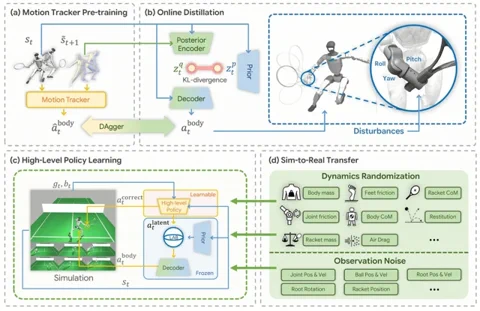
Tsinghua Üniversitesi ve Galbot Inc. araştırmacılarının liderliğini üstlendiği proje, robotikteki temel bir sorunu ele aldı: karmaşık, çevik hareketleri mükemmel bir talimat kılavuzu olmadan öğretmek. Sistemleri, parçalanmış, mükemmel olmayan insan tennis hareketlerinden “gizli eylem uzayı” öğreniyor. Sırrı, dijital bir antrenör gibi davranan üst düzey bir yapay zeka politikası - bu kusurlu temel becerileri düzelten ve birleştiren, topu ağın üzerinden başarıyla döndüren bir sistem. Tüm bu süreç, gerçek bir Unitree G1 insansı robotuna simülasyondan gerçeğe aktarılmadan önce simülasyonda geliştirildi.
Kanıt, pudingle değil, bu sefer skor tabelasında. Baş yazar Zhikai Zhang‘a göre öğrenme eğrisi oldukça dikti. “Gerçek dünya dağıtımının ilk gününde, attığım hiçbir topu döndüremedi,” dedi Zhang. “Projenin son gününde artık onu yenemiyordum.” Teknik detailara dalmek ya da belki kendi tennis oynayan robotlarını eğitmek isteyenler için, ekip proje detaylarını ve kodlarını erişime açtı. Bağlantı: Proje Sayfası ve Bağlantı: GitHub Deposu.
Neden önemli?
Bu sadece yalnız tennis profesyonelleri için robotik bir antrenman ortağı yaratmak değil. LATENT sisteminin gerçek başarısı, dağınık, kusurlu verilerden öğrenme yeteneğinde yatıyor. Çoğu robotik eğitim, hazırlanması pahalı ve zaman alan özenle seçilmiş veri kümeleri gerektirir. Kusurlu örnekleri düzeltmeyi ve birleştirmeyi öğrenerek, bu yaklaşım robotlara karmaşık, gerçek dünya görevlerini öğretme şeklimizi dramatik hızlandırabilir. Depolardan felaket bölgelerine kadar öngörülemeyen ortamlarda, her seferinde mükemmel bir gösterim gerektirmeden iş başında öğrenebilecek robotlara doğru önemli bir adım.
