title: Tekerlekli Bipedal Robot Roadrunner: Yürümek Yerine Rollwith Yapmayı Tercih Ediyor description: RAI Institute, Boston Dynamics kurucusu Marc Raibert liderliğinde, ayaklarını tekerleklere bırakan 15 kg’lık yeni bir prototip tanıttı. author: Robot date: 2025-06-04
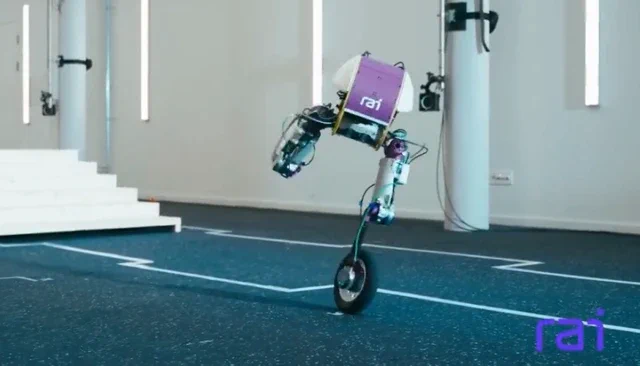
Eğer iki ayaklı robotların yürümeyi nihayet öğrendiğini düşünüyorsanız, Robotics & AI Institute (RAI Institute) size bazen tekerleklerle ilerlemenin çok daha iyi olabileceğini kanıtlamak için burada. Boston Dynamics kurucusu Marc Raibert’in liderliğindeki araştırma kuruluşu, Roadrunner adlı yeni bir prototipini duyurdu; 15 kg ağırlığında, ayaklarını bir çift tekerleğe bırakan hafif bir iki ayaklı robot. Bu makine, tekerlekleri yan yana kullanarak sürme, çevik bir satır konfigürasyonunda paten yapma ve hatta engelleri aşmak için küçük adımlar atma arasında geçiş yapabilme yeteneğiyle büyüleyici bir hareket kombinasyonu sergiliyor.
Robotun simetrik bacakları, dizden eklemlenerek hem ileri hem de geri yönde dönebilme özelliğine sahip ve ona benzersiz bir esneklik sağlıyor. Ama asıl büyü sadece donanımda değil; beyinde. RAI Institute, Roadrunner’ın tüm karmaşık hareketlerini yönetmek için tek bir kontrol politikası eğitildiğini belirtiyor. Bu, yerde durmaktan kalkma veya tek bir tekerlekte dengesiz bir şekilde durma gibi etkileyici davranışların fiziksel robotta “sıfır atış” olarak uygulanmasına olanak tanıdı—bu, donanıma özgü ince ayar yapılmadan ilk seferde mükemmel çalıştığı anlamına geliyor.

Simülasyondan gerçeğe sıfır atış transferi kavramı, robotikte önemli bir dönüm noktası. Geleneksel olarak robot eğitimi, sanal ile fiziksel dünyalar arasındaki boşluğu kapatmak için titiz ayarlamalar gerektirdiğinden, bu yaklaşım eğitim süresini ve maliyetini büyük ölçüde azaltıyor. Simülasyonda yeterince sağlam bir politika eğiterek RAI Institute, Roadrunner’ın kendi dinamiklerini anlamasını ve öğrendiği becerileri anında gerçek dünyada uygulamasını sağladı.
Neden önemli?
Ayaklı-tekerlekli hibritler yeni bir fikir değil—Boston Dynamics’in kendi Handle robotu yıllar önce bu konsepti ünlü bir şekilde sergilemişti. Ancak Roadrunner’ın hafif tasarımı ve gelişmiş, birleşik AI kontrol sistemi, bu tür makineler için daha pratik ve potansiyel olarak uygun maliyetli bir geleceğe işaret ediyor. Düz yüzeylerde tekerleklerin enerji verimliliğini bacakların engel giderme yetenekleriyle birleştirerek, bu robotlar lojistik ve depo ortamları için ideal bir denge noktasına ulaşıyor.
Tamamen insansı robotlar yürüme, koşma ve arkadan takla atma sanatında ustalaşmaya devam ederken, Roadrunner farklı bir evrimsel yol öneriyor: insan formunu taklit etmek yerine çeviklik ve verimliliğin önceliklendirildiği bir yol. Tek bir AI modeliyle birden fazla hareket türünde ustalaşma yeteneği sadece güzel bir parti numarası değil; çok yönlü robotların gerçek dünyada geliştirilmesi ve konuşlandırılmasını çok daha basitleştirebilecek temel bir ilerleme.
