I en vändning som inte borde överraska någon som har hängt med, har en forskare utvecklat en robot som lärt sig en ny färdighet så bra att den omgående besegrade sin mänskliga lärare. Sporten var tennis, och projektet, kallat LATENT, lärde en humanoid att spela inte från orena, professionella data, utan från ofullkomliga mänskliga rörelseklipp. Resultatet är en robot som nu kan hålla sig framme i multi-shot-rallyn.
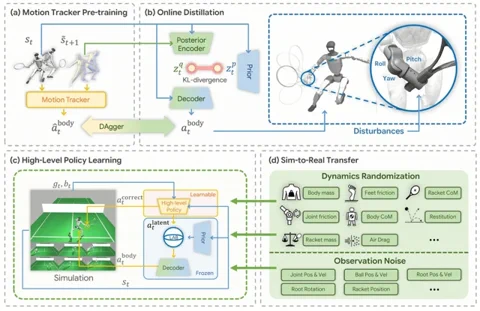
Projektet, lett av forskare från Tsinghua University och Galbot Inc., tog sig an en central utmaning inom robotiken: att lära ut komplexa, smidiga rörelser utan en perfekt instruktionsbok. Deras system lär sig ett “latent handlingsutrymme” från fragmenterade, mindre än perfekta mänskliga tennisrörelser. Hemligheten är en högnivå-AI-policy som fungerar som en digital tränare, som korrigerar och kombinerar dessa bristfälliga grundläggande färdigheter för att framgångsrikt returnera en boll över nätet. Hela denna process finslipas i simulering innan den distribueras på en riktig Unitree G1-humanoidrobot genom sim-till-verklighet-överföring.
Beviset ligger i puddingen, eller i det här fallet, resultattavlan. Enligt huvudförfattaren Zhikai Zhang var inlärningskurvan brant. “På den första dagen av verklig implementering kunde roboten inte returnera en enda boll som jag servade,” sa Zhang. “På den sista dagen av projektet kunde jag inte längre besegra den.” För de som är sugna på att dyka in i de tekniska detaljerna eller kanske träna sin egen tennis-spelande härskare har teamet gjort projektdetaljerna och koden tillgängliga. Länk: Projektsida och Länk: GitHub-repo.
Varför är detta viktigt?
Det handlar inte bara om att skapa en robotisk träningspartner för ensamma tennisspelare. Det verkliga genombrottet med LATENT-systemet är dess förmåga att lära från rörig, ofullkomlig data. De flesta robotträning kräver noggrant kuraterade datamängder, som är dyra och tidskrävande att skapa. Genom att lära sig att korrigera och kombinera bristfälliga exempel kan detta tillvägagångssätt dramatiskt påskynda hur vi lär robotar att utföra komplexa, verkliga uppgifter. Det är ett betydande steg mot robotar som kan lära sig på jobbet i oförutsägbara miljöer, från lager till katastrofzoner, utan att behöva en perfekt demonstration varje gång.
