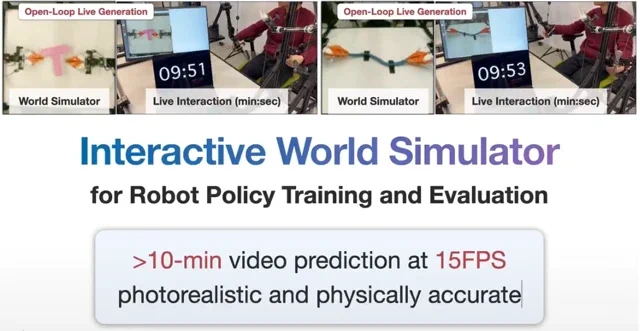
— | Världsmodeller inom robotik har ofta den fysiska konsistensen hos en blöt papperspåse under långa simuleringar. Ett nytt projekt, Interactive World Simulator, är här för att ändra på det – med förmågan att generera över 10 minuter av stabil, interaktiv video i 15 FPS, allt körandes på ett enda NVIDIA, Inc. RTX 4090. Ja, du läste rätt. Tio minuter av komplex fysik, som rullar smidigt på ett konsument-GPU.
Utvecklad av forskaren Yixuan Wang är denna handlingsvilliga världsmodell inte bara en förberäknad video – det är en helt interaktiv simulering du kan “köra” i realtid. Det mest imponerande? Du kan testa den själv i en webbläsarbaserad demo just nu, inga Python-bibliotek eller pip install-maraton krävs. Modellen hanterar en rad kontaktrika uppgifter, från intrikat kabeldragning till att sköja travar av objekt, allt genererat rent i pixelrymd. Det här är inte videor från en riktig kamera – det är öppna loop-förutsägelser från modellen själv.
Varför är detta viktigt?
Det här är inte bara en cool techdemo – det är en potentiell lösning på två av robotikens största huvudvärk. För det första möjliggör det skalbar datagenerering. Istället för att förlita sig på långsamma, dyra verkliga robotar för att samla träningsdata kan utvecklare generera berg av fysikaliskt plausibla data inne i simulatern. För det andra möjliggör det trogen policyutvärdering, vilket låter forskare testa och förfina en robots “hjärna” i en säker, konsekvent och oändligt repeterbar virtuell värld innan de någonsin rör vid en hårdvarudel. Kort sagt, det gör robotträning billigare, snabbare och mindre benägen att sluta med en arm värd flera tusen kronor som slår hål i väggen.
