Adicionar um terceiro robô à sua frota não devia ser o beijo da morte para todo o sistema, mas para uns estimados 90% das equipas de robótica, essa é a dura realidade. A complexidade da coordenação multi-robô, com a sua dependência de controladores centralizados e comunicação de alta largura de banda, tem sido um verdadeiro calcanhar de Aquiles. Mas investigadores da Oregon State University acabam de desvendar um plano para um futuro onde as equipas de robôs coordenam-se com a inteligência silenciosa e emergente de uma colónia de formigas.
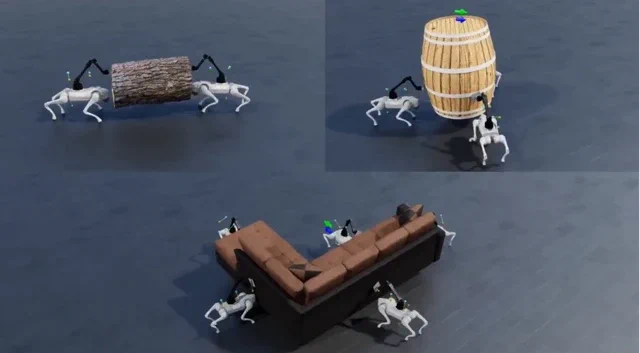
O seu novo artigo, decPLM (Decentralized Pinch-Lift-Move), foi aceite na IEEE International Conference on Robotics and Automation (ICRA) 2026 – o equivalente, no mundo da robótica, a conseguir um lugar de destaque no palco principal do Coachella. O sistema permite que uma equipa de robôs quadrúpedes com braços levante e mova cooperativamente objetos pesados e difíceis de agarrar, como troncos, barris e até um sofá, tudo isto sem uma única troca de informação. Nada de nó mestre, nada de Wi-Fi, nada de uma troca frenética de comandos ao nível das articulações. Em vez disso, a coordenação emerge puramente do facto de os robôs sentirem as forças exercidas sobre o objeto que transportam, usando apenas os seus próprios sensores internos – um conceito conhecido como proprioceção.
A magia reside numa política partilhada, treinada com um engenhoso sistema de “Constellation Reward”, que incentiva os robôs a atuar como se estivessem rigidamente presos à carga. Esta abordagem descentralizada é surpreendentemente eficaz e escalável. A política foi treinada usando apenas dois robôs em simulação, mas generaliza para equipas de até dez sem qualquer retreinamento. Isto contorna os habituais pesadelos de rede que atormentam os sistemas multi-robô, onde adicionar mais agentes leva frequentemente a uma latência e complexidade paralisantes.
Porquê que isto é importante?
Esta investigação vira uma premissa comum de pernas para o ar: a de que mais robôs equivalem a mais problemas. Com o decPLM, mais robôs significam, na verdade, menos erro. A equipa descobriu que, à medida que a frota aumentava de dois para dez robôs, o erro de rastreamento da carga útil caía uns espantosos 80%. A redundância da equipa maior compensa naturalmente os erros individuais, levando a uma operação mais fluida e precisa.
Ao remover a muleta da comunicação, a Oregon State criou um sistema intrinsecamente mais robusto, escalável e adaptável. Aponta para um futuro onde implementar um enxame de robôs logísticos é tão simples como adicionar outra unidade ao grupo, sem ter de redesenhar toda a rede. Como o material original o coloca sem rodeios, este trabalho valida que “o gargalo na robótica já não é a capacidade do hardware — é a Infraestrutura de ML”.












