Quem disse que cachorro velho não aprende truque novo? Bem, neste caso, não estamos falando de um vira-lata comum, mas de robôs quadrúpedes que estão aprendendo a fazer muito mais do que apenas “dar a pata” ou buscar a bolinha. Graças a uma colaboração de peso entre a Carnegie Mellon University, o Google DeepMind e a Bosch, nossos amigos mecânicos de quatro patas estão subindo de nível com um sistema batizado de Human2LocoMan. E não se trata apenas de um passeio no parque; é um verdadeiro salto quântico para a robótica.
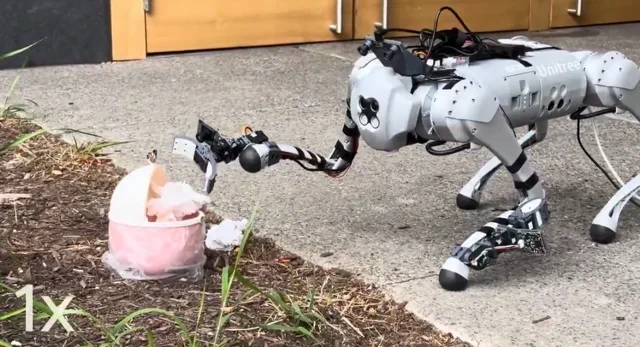
O “pulo do gato” (ou do cachorro, se preferir) está nos dados humanos. Ao realizar o pré-treinamento das políticas de controle do robô com base no movimento humano — antes mesmo de fazer o ajuste fino no hardware real —, os pesquisadores criaram um quadrúpede que não é apenas rápido e ágil, mas capaz de manipular objetos com uma destreza impressionante. Imagine um cão-robô que não só corre atrás de uma bola, mas consegue pegá-la, organizar seus próprios brinquedos e, quem sabe, até dar uma mãozinha (ou uma pata) nas tarefas domésticas. As imagens mostram uma dessas maravilhas da engenharia estendendo seu braço robótico para interagir com objetos no chão, exibindo uma coordenação motora fina que até pouco tempo era exclusividade de robôs humanoides.
Isso está longe de ser apenas um truque para impressionar em feiras de tecnologia; é um avanço estrutural. O sistema Human2LocoMan, impulsionado por um Modularized Cross-Embodiment Transformer (MXT), aprende tanto com demonstrações humanas quanto robóticas. O resultado? Uma redução de 50% na necessidade de dados específicos do robô e uma melhoria impressionante de 80% na taxa de sucesso ao enfrentar ambientes totalmente desconhecidos. É como se o robô fizesse um curso intensivo de “Como ser mais humano” e se formasse com honras. Com esse nível de habilidade, talvez não demore muito para vermos quadrúpedes assumindo funções que antes pareciam impossíveis. Um robo-barista, alguém aceita?












