Vamos falar sobre o elefante na sala limpa. Enquanto o capital de risco se atropela para financiar o próximo prodígio bipedal, uma verdade inconveniente e condenatória se esconde à vista de todos: apesar dos bilhões investidos, o trabalho útil total realizado por esta nova onda de robôs avançados é, sendo generoso, um erro de arredondamento.
Em um despacho recente e brutalmente honesto, Yang York, cofundador da Dyna, usou um bisturi para dissecar o hype, e o quadro que ele pinta não é nada bonito. Esqueça os vídeos editados de robôs fazendo parkour ou segurando um ovo com delicadeza. A história real está nos números, e eles revelam um abismo profundo. Entre 2022 e 2025, a indústria de robótica aspirou mais de US$ 18 bilhões em financiamento. No entanto, em pleno início de 2026, o impacto no mundo real permanece infinitesimal.
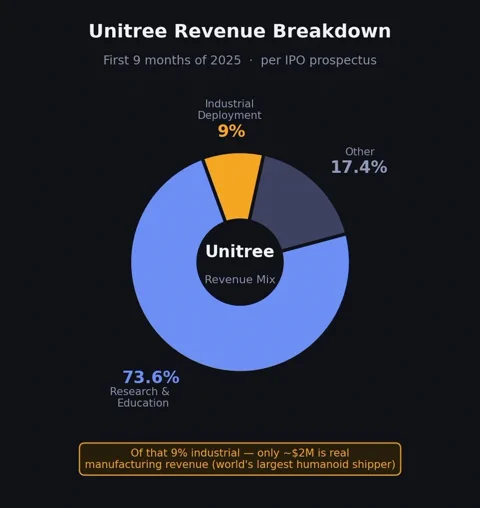
York aponta para os garotos-propaganda do boom do hardware. Elon Musk, da Tesla, admitiu em uma teleconferência de resultados em janeiro de 2026 que, efetivamente, zero robôs Optimus estavam realizando trabalho útil em suas fábricas. E a Unitree, possivelmente a maior fornecedora de humanoides do mundo, revelou em seu prospecto de IPO em março que impressionantes 73,6% de sua receita vinham de vendas para pesquisa e educação. Implementação industrial real? Meros 9%, a maior parte em funções de “recepção empresarial e guia turístico”. A receita proveniente de tarefas de fabricação reais foi uma ninharia de aproximadamente US$ 2 milhões.
Esse abismo entre a expectativa financeira e a realidade física é o que York chama de bolha. E não se trata de saber se a tecnologia eventualmente funcionará. Trata-se do cronograma. Como ele define: “Uma bolha é o hiato entre a capacidade técnica atual e as expectativas humanas, multiplicado pelo tempo.”
Sua analogia com LLMs é ruim e você deveria se sentir mal por isso
Um ponto central do argumento de York é que a indústria de robótica está “viciada na própria narrativa”, baseando-se em analogias falhas. Investidores e fundadores, embriagados pelo crescimento exponencial dos Grandes Modelos de Linguagem (LLMs), tentam aplicar o mesmo manual ao mundo dos átomos, e o resultado é um fracasso espetacular.
Os LLMs escalaram na velocidade da luz porque são puro software, distribuídos instantaneamente para bilhões de pessoas via internet. Robôs, contudo, são físicos. Eles quebram. Precisam de manutenção. Têm que navegar no caos bagunçado e imprevisível do mundo real.
A analogia mais tentadora, e igualmente equivocada, é com a indústria de veículos autônomos (AV). Mas nem essa se encaixa. Um carro é útil mesmo sem direção autônoma; é uma categoria de produto estabelecida, um canal de distribuição esperando por um upgrade de IA. Já um humanoide sem inteligência, ironiza York, é “uma máquina de 27 quilos com 28 graus de liberdade e propósito nenhum”. Não há uma base de usuários cativa. Não há uma estrutura instalada para atualizar. A indústria está tentando construir o aplicativo, o telefone e a rede de celular, tudo ao mesmo tempo.
Isso significa que a robótica não terá uma curva de decolagem no formato de um LLM. Nem mesmo no formato de um veículo autônomo. Terá uma curva própria da robótica, e a recusa da indústria em aceitar isso é seu erro mais caro.
As Três Grandes Decepções da Robótica Moderna
York identifica três falácias centrais que sustentam a bolha do hype. São as mentiras reconfortantes que a indústria conta a si mesma enquanto abocanha mais um cheque de nove dígitos.
1. Hardware não é canal de distribuição
O equívoco mais dispendioso é acreditar que entregar um robô físico é o mesmo que construir um canal de distribuição. A lógica é: coloque o hardware na instalação do cliente e o resto virá naturalmente. Isso é um erro fatal.
Um canal real cria valor recorrente. Se um robô faz uma demonstração e depois fica pegando poeira porque não consegue atingir a meta de ROI, você não tem um canal. Você tem um peso de papel caríssimo. York argumenta que um verdadeiro canal de robótica é um sistema de implantação completo: avaliação do local, definição de tarefas, captura de dados, depuração remota e atualizações contínuas.
“O teste de um canal é se a próxima implementação é mais rápida que a anterior”, escreve York. “Se não for, você não construiu um canal. Você construiu estoque e relações públicas.”

2. Seu “Modelo de Fundação” é quase só fundação
O segundo erro é uma incompreensão de como os modelos de IA realmente se tornam bons. Toda a conversa na robótica tem sido sobre o pré-treinamento em conjuntos de dados massivos. Mas o “pulo do gato” dos LLMs modernos não é apenas o pré-treinamento; é o loop iterativo e fechado entre o pré-treinamento e o feedback pós-treinamento específico do domínio.
A robótica mal começou esse ciclo. A maioria das equipes está alimentando modelos com mais dados à força, rezando para que a capacidade surja por osmose. Mas sem o sinal de pós-treinamento vindo de implementações do mundo real — de robôs realmente falhando no chão de fábrica — os modelos não conseguem amadurecer. Não existe uma métrica unificada como a “perplexidade” de um LLM para otimizar. Um modelo que gabarita um benchmark no laboratório é inútil se não souber lidar com as mudanças de iluminação em um armazém real.
3. O volante de inércia é feito de coisas chatas
Isso nos leva à parte mais subestimada da estrutura: a infraestrutura de implementação. Não se trata apenas de vendas; é o trabalho de engenharia árduo e pouco glamoroso de transformar uma implementação isolada em um ativo reutilizável e cumulativo. São as ferramentas de diagnóstico remoto, roteamento de dados e atualizações confiáveis.
Sem esse “volante de inércia” (flywheel), todo o sistema trava. O robô não entra em ambientes reais. O modelo não recebe os dados do mundo real necessários para melhorar. A curva de capacidade estagna, não importa quanto poder computacional você jogue nela. A bolha, argumenta York, “vive no hiato entre as equipes que entenderam isso e as equipes que ainda estão otimizando para números de benchmark e vídeos de demonstração.”
A única saída é atravessar
Diante dessa realidade, o campo se dividiu. Alguns focam no modelo primeiro, apostando que um “cérebro” poderoso o suficiente resolverá o problema e o hardware se tornará uma commodity. Outros focam no hardware primeiro, acreditando que o corpo perfeito é a chave e que o software de código aberto preencherá as lacunas.
York e a Dyna estão firmemente no terceiro campo: a integração vertical. Eles não escolheram esse caminho por ser tendência; escolheram porque, após um ano implantando seu modelo DYNA-1, perceberam que a alternativa era impossível. Aprenderam da maneira mais difícil que a implementação não fica magicamente mais fácil. O loop de feedback precisa ser fechado simultaneamente em pesquisa, hardware e implementação.
Este é o trabalho que temos pela frente. Não se trata de perseguir o próximo vídeo viral. Trata-se do processo minucioso de construir um sistema que torne a décima implementação mais rápida e confiável que a primeira. A primeira equipe a realmente decifrar esse código não apenas vencerá o mercado — ela o definirá. Até lá, estamos todos apenas assistindo a uma feira de ciências extremamente cara.
