미국 **국립표준기술연구소(NIST)**가 번지르르한 홍보 영상 속에서만 ‘만능’이었던 휴머노이드 로봇들을 시험대에 올리기로 했습니다. 이른바 ‘기초 성능 벤치마크(Baseline Performance Benchmark)‘라 불리는 이 표준화된 장애물 코스는, DARPA 로보틱스 챌린지(DRC)가 로봇들에게 처절한 ‘현타(현실 자각 타임)‘를 선사한 지 약 10년 만에 등장한 본격적인 실전 테스트입니다.
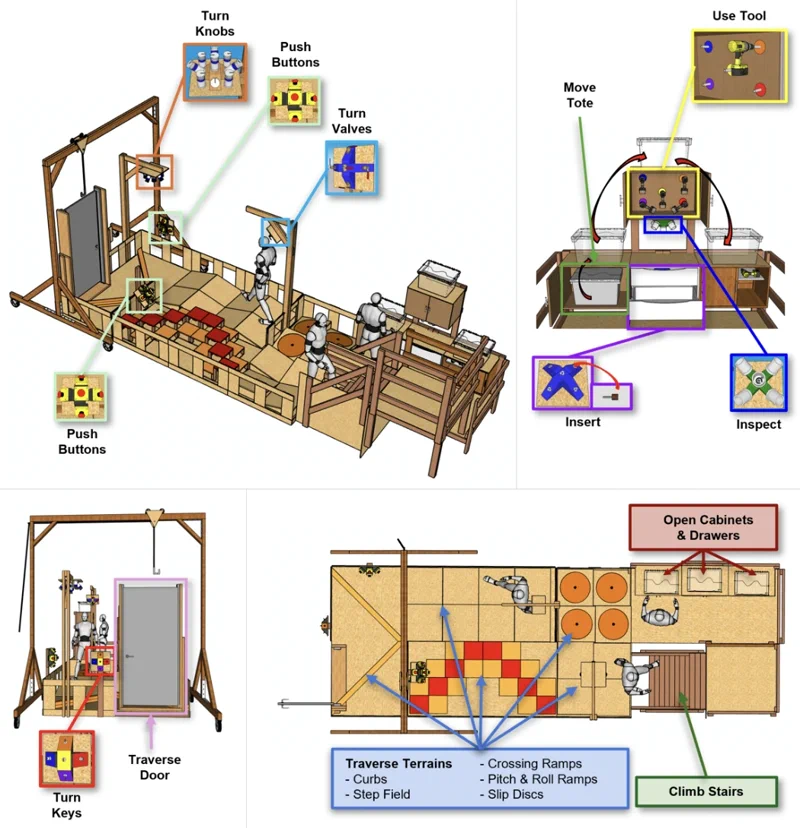
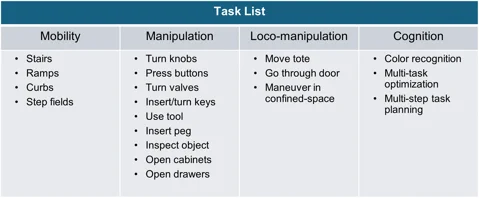
지난 2013~2014년에 열렸던 DRC는 로봇들의 화려한 ‘몸 개그’ 영상미와 함께, 문손잡이를 돌리는 지극히 일상적인 동작조차 기계에게는 얼마나 가혹한 과제인지를 뼈저리게 각인시킨 바 있습니다. 당시 테스트를 설계했던 NIST는 이제 현대적 기준에 맞춘 새로운 평가 지표를 제안하고 나섰습니다. 상용화를 앞둔 휴머노이드라면 마땅히 갖춰야 할 능력들을 정량적으로 측정하겠다는 것이죠. 이번 벤치마크는 크게 네 가지 핵심 영역을 다룹니다: 이동성(계단, 경사로), 조작성(노브 돌리기, 도구 사용), 복합 조작(상자를 들고 문 통과하기), 그리고 인지 능력(다단계 작업 계획 수립).
NIST는 업계와 협력하여 테스트 장치를 개발 중이며, 참여 의사를 밝힌 미국 내 로봇 제조사들에게 실제 테스트 베드를 무상으로 배포할 계획입니다. 특히 Boston Dynamics, Figure AI, Tesla 같은 기업들에게 테스트 설계에 대한 의견을 구하고 있는데, 이는 기업들이 자신들을 측정할 ‘줄자’를 직접 만드는 과정에 참여시키는 셈입니다.
이 움직임이 중요한 이유는 무엇일까요?
그동안 로봇 업계는 완벽하게 통제된 환경에서 촬영된 ‘무결점 데모 영상’에 의존해 왔습니다. 서로 다른 회사의 로봇 성능을 객관적으로 비교할 수 있는 표준이 없다 보니, 고객과 투자자들은 누가 진짜 실력자이고 누가 영상 편집의 달인인지 구분하기 어려운 실정이었습니다. NIST의 이번 벤치마크는 바로 이러한 ‘하이프(Hype, 과장 광고)‘의 거품을 걷어낼 강력한 도구가 될 것입니다.
반복 가능하고 측정이 가능한 공통 과제를 제시함으로써, NIST는 로봇 성능을 1대 1로 비교할 수 있는 공정한 경기장을 마련했습니다. 실험실 안에만 갇혀 있는 프로토타입과 현장에 투입될 준비가 된 진짜 기계를 가려내는 옥석 가리기가 시작된 것이죠. 상용화의 문턱에 선 로봇 산업에 있어, 이러한 객관적인 검증은 신뢰 구축과 기술 발전을 위해 선택이 아닌 필수입니다. 더 자세한 내용은 공식 제안서에서 확인하실 수 있습니다.
