Gesture Platforms가 로봇 업계에 도전장을 내밀었습니다. 아니, 정확히는 아주 정교한 ‘로봇 손’을 내밀었다고 해야겠네요. 이들이 킥스타터(Kickstarter)를 통해 공개한 Gesture HW1은 로봇 팔 끝에 달린 투박한 ‘인형 뽑기 집게’에 진저리를 치던 연구자, 메이커, 교육자들의 시선을 단숨에 사로잡았습니다. HW1은 10자유도(10-DOF)를 갖춘 로봇 손과 손목 시스템으로, 천문학적인 비용을 들이지 않고도 인간 수준의 정교한 움직임을 구현하겠다는 야심 찬 프로젝트입니다.
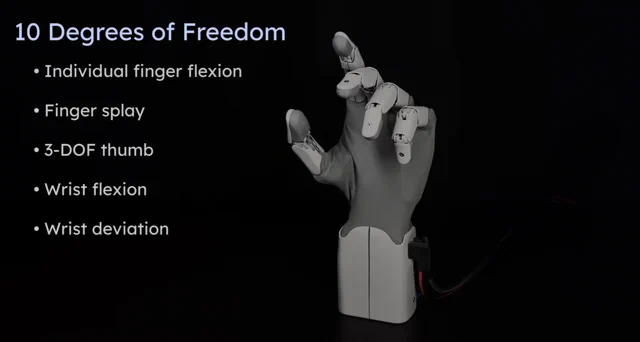
펀딩 목표액인 1만 달러를 가볍게 돌파한 이 제품은 1,000달러 미만이라는 파격적인 가격표를 달고도 강력한 성능을 자랑합니다. 480g의 가벼운 무게에도 불구하고, 개별 손가락의 굴곡과 벌림(splay), 3자유도 엄지, 그리고 2자유도 손목까지 총 10개의 구동축을 갖췄습니다. 덕분에 인간의 다양한 움켜쥐기 동작과 포즈를 그대로 흉내 낼 수 있죠. Gesture Platforms는 실용성에도 공을 들였습니다. 육각 렌치 하나만 있으면 사용자가 직접 수리할 수 있도록 설계되었으며, 복잡한 소프트웨어 설정 없이 바로 사용할 수 있는 플러그 앤 플레이(plug-and-play) 데스크톱 앱을 제공해 진입 장벽을 대폭 낮췄습니다.

현재 킥스타터 캠페인에서 HW1의 얼리버드 가격은 849달러(약 115만 원)부터 시작합니다. 향후 책정된 권장소비자가격(MSRP)인 1,299달러와 비교하면 상당히 공격적인 가격 설정입니다. 이는 단순한 저가형 그리퍼와 Shadow Robot Company 제품처럼 수천만 원에서 수억 원을 호가하는 하이엔드 연구용 로봇 손 사이의 ‘거대한 공백’을 공략하겠다는 전략으로 풀이됩니다.
이것이 왜 중요한가?
로봇 공학 분야에서 ‘정교한 조작(Dexterous manipulation)‘은 오랫동안 난제로 남아 있었습니다. 가장 큰 걸림돌은 역시 비용이었습니다. 웬만한 대학 연구소나 개인 제작자들은 인간처럼 복잡한 작업을 수행할 수 있는 로봇 손의 가격을 감당하기 어려웠죠. 최근 카네기 멜런 대학교의 LEAP Hand 프로젝트나 이번 Gesture HW1의 등장은 이러한 패러다임을 완전히 뒤흔들고 있습니다.
신뢰할 수 있고 수리가 용이하며, 무엇보다 ‘살 만한’ 가격의 플랫폼이 보급된다는 것은 고급 로봇 기술의 민주화를 의미합니다. 이는 강화 학습(Reinforcement Learning), 인간-로봇 상호작용(HRI), 원격 제어(Teleoperation) 분야의 연구 속도를 비약적으로 높일 것입니다. 이제 거대 자본이 투입된 기업이나 명문대 연구실이 아니더라도, 소규모 팀이나 개인이 고난도 로봇 태스크를 실험할 수 있는 시대가 열린 셈입니다. 계획대로 Python 및 C++ SDK까지 지원된다면, HW1은 차세대 로봇 혁신을 이끌 핵심 장비로 자리 잡을 가능성이 큽니다.
