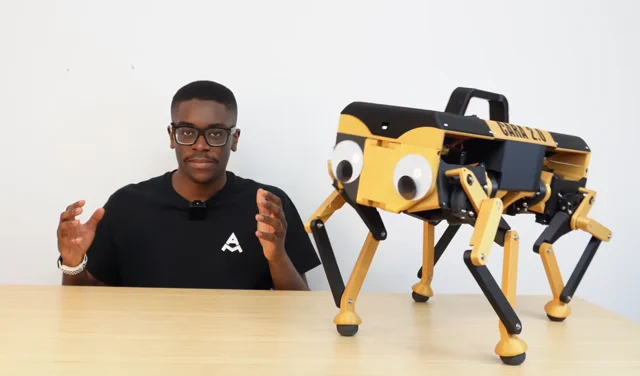
메이커이자 유튜버인 Aaed Musa가 독특한 와이어 구동 방식의 로봇 강아지, 그 두 번째 버전을 들고 돌아왔습니다. 이번에 공개된 CARA 2.0의 스펙은 그야말로 ‘환골탈태’ 수준입니다. 대학 졸업 과제로 탄생한 이 로봇은 이전 모델의 제작 비용을 절반 이하인 **1,450달러(약 200만 원)**까지 낮췄고, 무게 역시 14.25kg에서 8.26kg으로 무려 42%나 감량하며 홀쭉해졌습니다. 백래시(backlash) 없는 깔끔한 캡스턴 구동으로 눈길을 끌었던 CARA: 로프 구동 로봇견의 혁명 의 정식 후속작입니다.

대학 캡스톤 프로젝트의 일환으로 개발된 CARA 2.0은 초당 0.55m의 속도로 걸으며, 약 6.8kg의 짐을 싣고 한 시간가량 작동할 수 있습니다. 당초 목표였던 ‘1,000달러 미만’에는 미치지 못했지만, 취미 수준에서 이 정도 역동성을 가진 사족보행 로봇을 1,450달러에 구현했다는 건 결코 과소평가할 수 없는 성과입니다. 제작팀은 값비싼 카본 파이프 대신 3D 프린팅 구조물을 채택하고, 저렴한 드론 모터를 직접 분해해 코일을 다시 감는(rewinding) 집념 끝에 토크를 3배로 끌어올리며 비용을 절감했습니다.
이 프로젝트가 시사하는 점
하지만 여기서 흥미로운 반전이 일어납니다. 프로젝트는 성공적이었지만, Musa는 이 로봇의 정체성이나 다름없는 핵심 기술에 작별을 고했습니다. CARA라는 이름은 사실 “캡스턴 드라이브는 정말 최고야(Capstans Are Really Awesome)“의 약자였는데, 제작을 마친 Musa는 “최고긴 한데, 정말 쓸 게 못 된다"는 결론을 내린 것이죠. 그는 이번 프로젝트를 끝으로 해당 설계를 은퇴시키겠다고 선언하며, “조립 편의성이 최악"이라는 뼈아픈 소회를 남겼습니다.
이는 공학도들이 현장에서 흔히 겪는 ‘이론과 실제의 괴리’를 보여주는 완벽한 사례입니다. 백래시 제로의 고성능 설계라도 조립과 유지보수가 지옥 같다면 실용성 면에서는 막다른 길에 다다를 수밖에 없습니다. Musa는 다음 로봇에서는 “기성품 액추에이터(off-the-shelf actuators)를 쓰겠다"며 지극히 현실적인, 그래서 조금은 서글픈 마침표를 찍었습니다. 더 싸고 좋은 로봇을 만드는 데는 성공했지만, 그 기반이 된 기술이 ‘아름답지만 비효율적인’ 방식이었음을 증명한 셈입니다. 자세한 기술적 내용은 Musa의 프로젝트 페이지에서 확인할 수 있습니다.