2026년 4월 9일, 미국 특허청(USPTO)이 공개한 **Tesla, Inc.**의 최신 특허 명세서에는 그 흔한 신경망(Neural Network)도, 세계 모델(World Model)도, 심지어 ‘AI’라는 단어조차 단 한 마디 언급되지 않았습니다. 대신 특허 번호 US20260097493A1은 오직 ‘무릎’ 하나만을 집요할 정도로 상세하게 파고듭니다. Tesla가 2022년 AI 데이를 개최했던 날과 같은 날짜에 출원된 이 특허는 휴머노이드 Optimus의 관절 속에 숨겨진 생체 모방 공학의 정수를 보여줍니다. 며칠 전 Elon Musk가 X(옛 트위터)를 통해 “Optimus 3가 걸어 다니기 시작했지만, 아직 마무리가 조금 더 필요하다"라고 언급했을 때, 그가 말한 ‘마무리’란 아마도 이 무릎을 뜻했을 가능성이 큽니다.
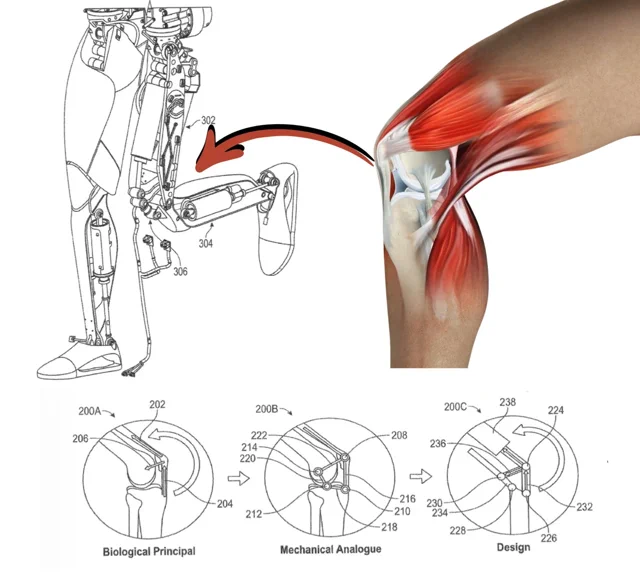
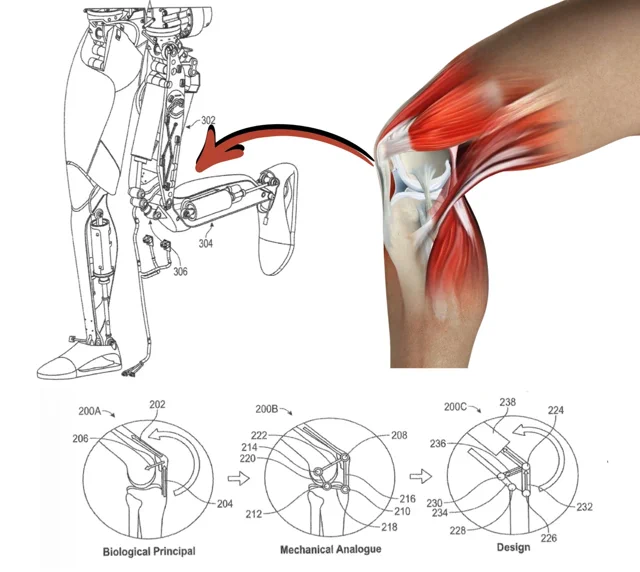
이 특허에서 가장 눈길을끄는 것은 복잡한 CAD 도면이 아니라, 세 개의 패널로 구성된 단순한 스토리보드입니다. ‘생물학적 원리(Biological Principle)‘라고 적힌 인간의 무릎 도표에서 시작해, 이를 기계적으로 형상화한 ‘기계적 모사(Mechanical Analogue)‘를 거쳐, 최종적인 ‘디자인(Design)‘으로 이어지는 흐름입니다. 이 문서는 대퇴사두근과 슬개골, 그리고 인대의 역할을 4절 링크(four-bar linkage) 시스템으로 어떻게 치환했는지 명확하게 보여줍니다. 이것은 단순한 로봇 부품이 아닙니다. 수백만 년에 걸친 진화의 결과물을 기계적으로 완벽하게 번역해낸 결과물입니다. 덕분에 단 하나의 소형 리니어 액추에이터만으로도 인간과 맞먹는 150도의 회전 범위를 확보했습니다.
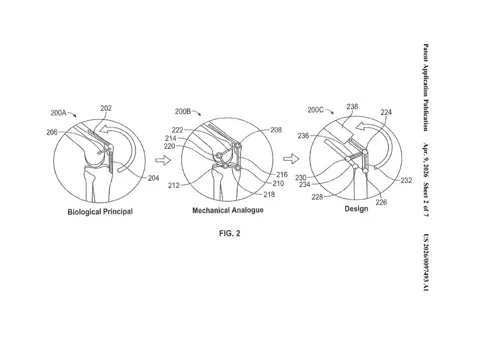
‘변형된 역 호켄 링크(modified inverse Hoecken’s linkage)‘라고 불리는 이 메커니즘은 복잡한 난제를 해결하는 우아한 해법입니다. 인간의 무릎이 효율적인 이유는 단순히 한 점을 축으로 회전하는 것이 아니라, 굽혀지는 각도에 따라 지렛대의 원리가 유동적으로 변하며 필요한 순간에 토크를 극대화하기 때문입니다. Tesla의 4절 링크 시스템은 이러한 ‘가변적 기계적 이점’을 그대로 재현했습니다. 덕분에 작은 모터 하나로도 강력하면서도 폭넓은 움직임을 만들어낼 수 있습니다. 특허에는 전력 소모를 최소화하면서도 목표 토크와 속도를 달성하기 위해 시뮬레이션을 통해 최적의 링크 길이를 찾아낸 과정이 고스란히 담겨 있습니다.
이것이 왜 중요한가?
이 무릎이야말로 Optimus의 가격 경쟁력을 결정짓는 핵심 열쇠이기 때문입니다. 복잡하고 전력 소모가 큰 대형 어셈블리 대신 단 하나의 소형 액추에이터를 사용함으로써, Tesla는 다리 하나의 비용과 무게, 복잡성을 획기적으로 줄였습니다. 이는 로봇 한 대당 2만~3만 달러라는 Elon Musk의 야심 찬 목표가를 달성하기 위한 필수 조건입니다. 현재 프리몬트 공장은 Model S와 X의 생산을 중단하면서까지 공간을 확보하고 연간 100만 대 규모의 로봇 생산 라인을 준비 중인데, 이러한 원가 절감은 그 계획의 근간이 됩니다.
Tesla의 설계가 영리하긴 하지만, 이런 기하학적 구조가 오직 Tesla만의 전유물은 아닙니다. 업계 분석가들은 Xpeng의 차세대 휴머노이드 ‘IRON’ 역시 이와 놀라울 정도로 유사한 링크 구조를 채택한 것으로 보고 있습니다. 2022년 AI 데이 이후 Tesla의 설계 방향이 공개되면서, 업계 전체가 가장 효율적인 단 하나의 정답을 향해 수렴하고 있는 모양새입니다. 자연의 진화가 무릎의 구조를 완성하는 데 수백만 년이 걸렸다면, Tesla는 그것을 한정된 예산 안에서 증명해내야 하는 과제를 안고 있습니다.