로봇이 인간의 유연함을 탐하다: 마크 레이버트의 RAI, 차세대 양팔 로봇 ‘아테나제로(AthenaZero)’ 공개
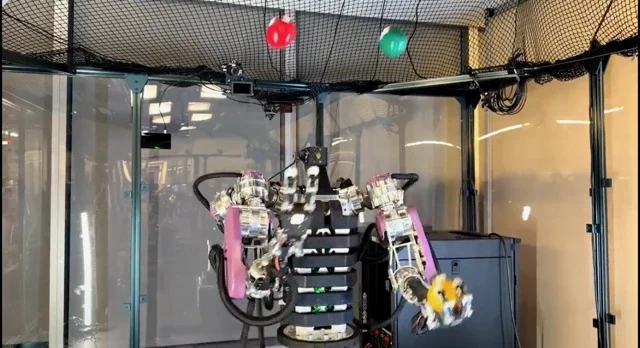
Boston Dynamics의 전설적인 창립자 Marc Raibert가 이끄는 연구 기관, **Robotics and AI Institute(RAI)**가 로봇 공학의 새로운 지평을 열었습니다. 이번에 베일을 벗은 AthenaZero는 우리가 흔히 보던 공장의 딱딱한 기계 팔과는 차원이 다릅니다. 마치 사람처럼 부드럽고 자연스럽게 움직이는 이 양팔 로봇은, 로봇 학계의 숙원 과제인 ‘역동적 조작(dynamic manipulation)‘을 해결하기 위해 태어났습니다.
기존의 산업용 로봇들은 높은 기어비 때문에 동작이 뻣뻣하고 둔탁하기 일쑤였습니다. 하지만 AthenaZero는 정반대의 길을 택했습니다. 약 160cm의 키에 각각 7자유도(DoF)를 가진 두 팔은 저관성과 고가속도 구현에 최적화되어 있습니다. 여기서 핵심은 바로 ‘콰지 다이렉트 드라이브(quasi-direct drive)’ 액추에이터입니다. 이를 통해 구현된 ‘힘의 투명성(force transparency)’ 덕분에, AthenaZero는 무거운 짐을 번쩍 들어 올리는 강력한 힘을 발휘하다가도, 순식간에 아주 섬세하고 부드러운 터치로 전환할 수 있습니다. 주변 환경이나 로봇 스스로에게 무리를 주지 않고 말이죠.
단순히 몸체에 팔 두 개를 붙인 것이 아닙니다. RAI의 목표는 복잡하고 정교한 협응 동작을 스스로 학습할 수 있는 플랫폼을 구축하는 것입니다. 양팔을 자유자재로 다루는 능력은 현재의 단일 팔 로봇이 해결하지 못하는 영역—복잡한 부품 조립, 크고 유연한 물체 조작 등—을 자동화하는 데 필수적입니다. 단순히 물건을 집어 정해진 위치에 놓는 반복 작업을 넘어선, 진정한 ‘기술’의 영역으로 진입한 셈입니다.
왜 이 로봇에 주목해야 하는가?
지난 수십 년간 자동화는 ‘힘은 세지만 지능은 부족한’ 로봇 팔이 반복적인 동작을 수행하는 수준에 머물러 있었습니다. Robotics and AI Institute는 이 문제를 하드웨어와 소프트웨어 양면에서 동시에 공략하고 있습니다. 역동적인 상호작용이 가능한 AthenaZero라는 하드웨어를 구축함과 동시에, 이를 제어할 AI 및 강화 학습 모델을 개발하고 있는 것이죠. 처음부터 학습 기반 제어를 염두에 두고 설계된 이 시스템은 인간 수준의 능력을 갖춘 ‘범용 조작기(general-purpose manipulator)‘를 향한 거대한 도약입니다. 이번 연구는 로봇이 공장의 안전 펜스를 넘어, 예측 불가능한 현실 세계로 걸어 나오는 결정적인 계기가 될 것입니다.
