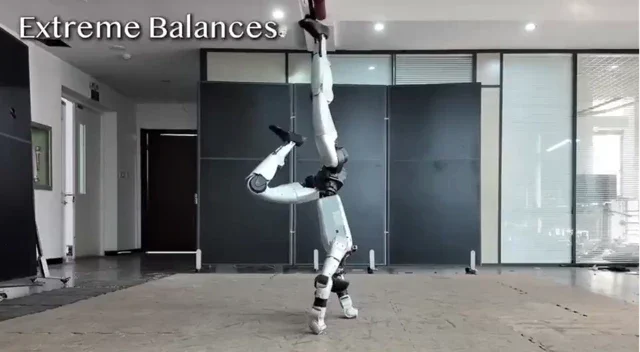
잘 짜인 각본대로 움직이는 로봇의 시대는 갔다. 이제는 스스로 균형을 잡으며 공중제비를 돌고, 아슬아슬한 지형을 통과하며, 심지어 비보잉까지 소화하는 ‘운동 천재’ 휴머노이드가 등장했다. 연구진이 공개한 OmniXtreme은 유니트리(Unitree Robotics)의 G1 로봇을 단순한 기계 덩어리에서 다재다능한 운동선수로 탈바꿈시킨 전천후 AI 정책이다. 이는 2026년 춘제 갈라쇼에서 화려하지만 정해진 동작만 반복했던 WuBOT 같은 ‘오버피팅(Overfitting)’ 모델과는 차원이 다른, 진정한 의미의 범용 신체 지능을 보여준다.
유니트리와 공동으로 진행된 이번 1년간의 프로젝트는 말 그대로 ‘뼈를 깎는’ 하드웨어의 희생이 뒤따랐다. 연구팀은 범용 동적 움직임의 해답을 찾기 위해 “수십 대의 G1 로봇을 제물로 바쳤다"고 고백했다. 대당 약 13,500달러(한화 약 1,800만 원)에 달하는 G1의 가격을 생각하면, 강화학습(RL)의 신에게 바친 제물치고는 꽤나 값비싼 비용이다. 연구의 핵심은 특정 동작만을 추종하도록 훈련된 기존 방식의 한계를 넘어, 현실 세계의 무질서한 물리 법칙 속에서도 극한의 기동을 수행할 수 있는 모델을 구축하는 것이었다.
그 비결은 이른바 ‘2단계 트레이닝’이라는 특수 레시피에 있다. 먼저 ‘플로우 기반 생성형 제어 정책(Flow-based generative control policy)‘을 사전 학습시켜 로봇에게 움직임에 대한 기초 체력을 길러준다. 그 다음, 실제 로봇의 복잡한 역학 구조와 물리적 한계를 정밀하게 조정하는 ‘구동기 인지 잔차 강화학습(Actuation-aware residual RL)‘을 통해 포스트 트레이닝을 거친다. 연구진은 이 두 번째 단계야말로 시뮬레이션과 현실의 간극, 즉 ‘심투리얼(Sim-to-Real)‘의 장벽을 허무는 결정적 열쇠였다고 설명한다. 로봇 공학 커뮤니티를 위해 이 모델의 체크포인트는 현재 GitHub에 전격 공개된 상태다.
이번 성과가 중요한 이유
단일화된 하나의 정책으로 이토록 폭넓고 강도 높은 동작을 모두 구현해냈다는 점은 로봇 공학의 중대한 이정표다. 이는 로봇이 특정 ‘장기 자랑’만 할 줄 아는 전문가를 넘어, 어떤 상황에서도 유연하게 대처할 수 있는 ‘제너럴리스트’로 진화하고 있음을 시사한다. 특히 극단적인 동적 환경에서 심투리얼 격차를 성공적으로 극복한 OmniXtreme의 프레임워크는, 향후 더 견고하고 적응력 뛰어난 휴머노이드 개발에 표준이 될 것으로 보인다. 이번 오픈소스 공개를 기점으로, 미래의 로봇 체조 선수나 댄서들이 등장하는 속도는 더욱 빨라질 전망이다.












