손가락 하나하나가 정교하게 움직이는 로봇 손 한 쪽을 장만하려면 15만 달러(약 2억 원) 이상을 ‘태워야’ 하는 게 로봇 공학계의 서글픈 현실입니다. 하지만 실리콘밸리의 한 스타트업이 이 판도를 완전히 뒤흔들 파격적인 대안을 들고 나왔습니다.
2025년 초, Tesla Optimus와 Waymo의 파운데이션 모델 팀을 이끌던 베테랑들이 의기투합해 설립한 TetherIA가 그 주인공입니다. 이들이 이번에 공개한 Aero Hand Open은 단돈 314달러(약 42만 원)면 키트를 사서 직접 조립할 수 있는 완전 오픈소스 로봇 손입니다.
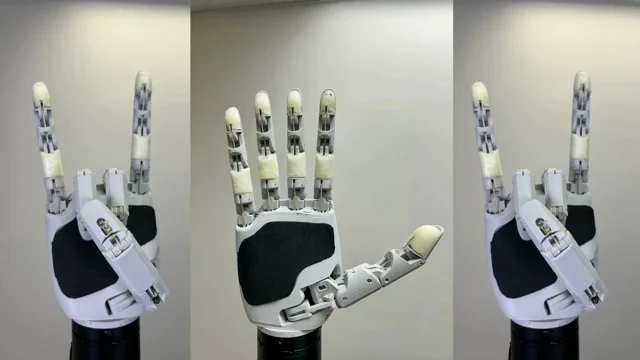
Aero Hand Open은 로봇 연구의 높은 진입 장벽을 허물기 위해 설계된 5지형 ‘힘줄 구동(tendon-driven)’ 매니퓰레이터입니다. 전체 구조를 나일론 소재로 3D 프린팅할 수 있고, 시중에서 쉽게 구할 수 있는 범용 전자 부품들을 사용해 제작 단가를 현실적인 수준으로 끌어내렸습니다. 16개의 관절을 통해 7개의 능동 자유도(DoF)를 구현하면서도 무게는 고작 389g에 불과합니다. 특히 모터의 힘을 케이블로 전달해 여러 관절을 동시에 제어하는 힘줄 구동 방식을 채택해, 마치 사람의 손처럼 부드럽고 유연하며 자연스러운 움직임을 보여줍니다.

소프트웨어 측면에서도 TetherIA는 현대적인 AI 개발 환경을 완벽하게 갖췄습니다. ROS2 시스템과 호환되는 것은 물론 전용 Python SDK를 제공하며, MuJoCo 물리 시뮬레이터에서도 즉시 구동 가능합니다. 여기에 NVIDIA Isaac Sim 지원까지 예고되어 있습니다. 덕분에 연구자들은 값비싼 실물 로봇을 망가뜨릴 걱정 없이, 시뮬레이션 환경에서 제어 알고리즘을 충분히 학습시키고 검증한 뒤 실제 하드웨어에 배포할 수 있습니다.
이게 왜 중요한가?
그동안 하드웨어의 살인적인 가격은 로봇의 정교한 조작 기술(dexterous manipulation) 발전을 가로막는 고질적인 병목 현상이었습니다. 물론 Aero Hand Open이 수억 원을 호가하는 산업용 매니퓰레이터의 성능을 단번에 압도하려는 건 아닙니다. 하지만 이 충격적인 가격과 오픈소스라는 무기는 로봇 공학의 ‘기술 민주화’를 이끌 기폭제가 되기에 충분합니다.
예산 부족에 시달리던 대학 연구실, 교육 기관, 심지어 개인 개발자들까지 로봇 공학의 최대 난제 중 하나에 도전할 수 있는 강력한 도구를 손에 쥐게 된 셈입니다. Tesla와 Waymo라는 화려한 배경을 가진 팀이 내놓은 결과물인 만큼, 이건 단순한 ‘가성비 프로젝트’가 아닙니다. 로봇 혁신의 속도를 밑바닥부터 끌어올리려는 전략적인 승부수입니다.












