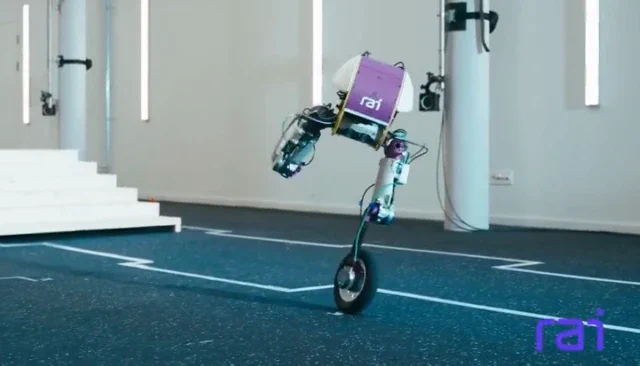
이족보행 로봇이 드디어 제대로 걷기 시작했다고 감탄하고 계신가요? **로보틱스 & AI 인스티튜트(RAI Institute)**는 한 발 더 나아가 “때로는 걷는 것보다 구르는 게 훨씬 낫다"는 사실을 증명해 보였습니다. 보스턴 다이내믹스(Boston Dynamics)의 창립자 Marc Raibert가 이끄는 이 연구소는 최근 **로드러너(Roadrunner)**라는 이름의 새로운 프로토타입을 공개했습니다. 무게가 고작 15kg에 불과한 이 가벼운 이족보행 로봇은 발 대신 한 쌍의 바퀴를 장착했습니다. 이 기계는 바퀴를 나란히 두고 주행하거나, 인라인 스케이트처럼 일렬로 배치해 기민하게 움직이고, 심지어 장애물을 넘기 위해 짧은 스텝을 밟는 등 자유자재의 로코모션(Locomotion) 능력을 보여줍니다.
로드러너의 대칭형 다리는 무릎 관절을 앞뒤 어느 방향으로든 꺾을 수 있어 매우 유연한 자세를 취할 수 있습니다. 하지만 진짜 마법은 하드웨어가 아닌 ‘두뇌’에 있습니다. RAI 인스티튜트에 따르면, 로드러너의 이 복잡한 움직임 전체를 제어하기 위해 단 하나의 제어 정책(Control policy)만을 학습시켰다고 합니다. 덕분에 지면에서 일어서거나 외바퀴로 아슬아슬하게 균형을 잡는 등의 인상적인 동작들을 실제 로봇에 적용할 때, 별도의 하드웨어 튜닝 없이도 단번에 성공하는 ‘제로샷(Zero-shot)’ 전이를 실현했습니다.

시뮬레이션에서 학습한 내용을 현실 세계로 즉시 적용하는 ‘제로샷 전이’는 로봇 공학의 중대한 이정표입니다. 이는 가상 세계와 현실 세계 사이의 간극(Sim-to-Real gap)을 메우기 위해 필요했던 고통스러운 조정 과정과 막대한 비용, 시간을 획기적으로 줄여주기 때문입니다. 시뮬레이션에서 충분히 견고한 정책을 학습시킴으로써, RAI 인스티튜트는 로드러너가 스스로의 역학 관계를 이해하고 학습된 기술을 현실에 즉각 투입할 수 있게 만들었습니다.
이것이 왜 중요한가?
다리와 바퀴가 결합된 하이브리드 형태는 아주 새로운 개념은 아닙니다. 보스턴 다이내믹스의 ‘핸들(Handle)’ 로봇이 이미 몇 년 전 이 컨셉을 화려하게 선보인 바 있죠. 하지만 로드러너의 경량화된 설계와 진보된 통합 AI 제어 시스템은 이러한 기계들이 훨씬 더 실용적이고 비용 효율적인 미래로 나아가고 있음을 시사합니다. 평지에서의 바퀴가 가진 에너지 효율성과 다리의 장애물 극복 능력을 결합한 이 로봇들은 물류 및 창고 환경에 최적화된 솔루션이 될 수 있습니다.
완전한 휴머노이드 로봇들이 걷고, 뛰고, 백덤블링을 연마하는 동안, 로드러너는 또 다른 진화의 길을 제시합니다. 바로 인간의 형태를 모방하는 것보다 ‘민첩성’과 ‘효율성’을 우선시하는 방향입니다. 단일 AI 모델로 다양한 이동 방식을 마스터하는 능력은 단순한 기술적 과시를 넘어, 다재다능한 로봇을 현실 세계에 훨씬 더 쉽고 빠르게 보급할 수 있게 만드는 근본적인 진보입니다.












