안 그래도 산더미처럼 쌓인 프로젝트 때문에 골치가 아픈데, 개발자들의 ‘할 일 목록’을 더 무겁게 만들 소식이 날아왔다. Y Combinator가 선택한 독일의 유망 스타트업, The Robot Learning Company가 AI 네이티브 로봇 팔의 설계도 전체를 GitHub에 전격 공개한 것이다. 이들은 자사의 하드웨어를 최대한 많은 개발자와 연구자의 손에 들려주겠다는 야심 찬 승부수를 던졌다.
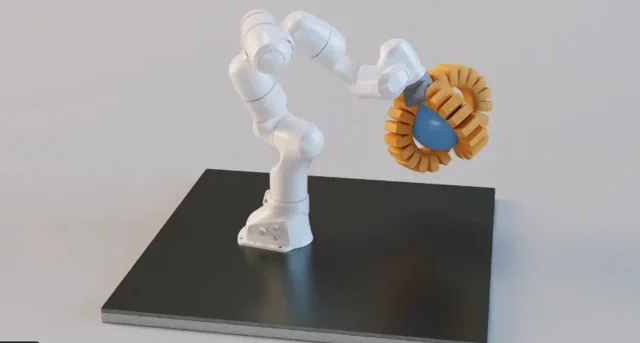
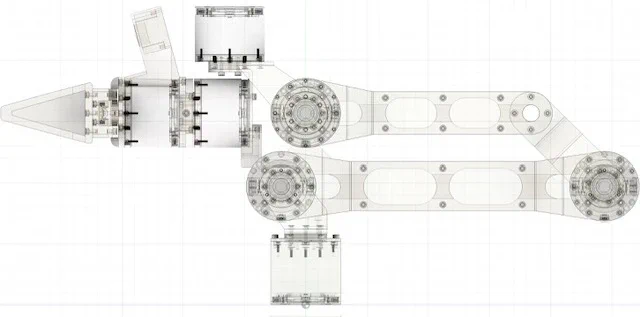
TRLC-DK1이라 명명된 이 프로젝트는 완전한 오픈 소스 개발 키트(Dev Kit)다. 저장소에는 하드웨어 제작을 위한 CAD 파일부터 구동에 필요한 소스 코드까지 모두 포함되어 있으며, 누구나 자유롭게 활용할 수 있는 Apache-2.0 라이선스를 따르고 있다. 시스템의 핵심은 ‘리더(Leader)‘와 ‘팔로워(Follower)’ 암(Arm)으로 구성된 텔레오퍼레이션(Teleoperation) 방식이다. 사람이 리더 암을 움직이면 로봇이 이를 그대로 따라 하며 배우는 ‘모방 학습(Imitation Learning)‘을 위한 전형적이면서도 강력한 구성이다. 700mm의 작업 반경과 1kg의 가동 하중(Payload)을 갖춰, 다양한 정밀 작업 실험에 투입하기에 부족함이 없는 스펙을 자랑한다.
왜 이 뉴스에 주목해야 하는가?
쓸만한 하드웨어 한 대 장만하려면 웬만한 중형차 한 대 값은 우습게 깨지는 폐쇄적인 로봇 시장에서, 이 정도 성능의 데브킷이 오픈 소스로 풀렸다는 건 그야말로 가뭄에 단비 같은 소식이다. The Robot Learning Company는 설계도를 투명하게 공개함으로써, 그동안 높은 비용 장벽에 막혀있던 실물 AI 및 로봇 공학 연구의 문턱을 획기적으로 낮췄다. 이제 규모가 작은 연구소나 스타트업, 심지어 열정 넘치는 개인 메이커들도 ‘영끌’ 대출 없이 직접 물리적인 AI 에이전트를 구축하고 실험할 수 있는 길이 열린 셈이다.
물론 여기서 ‘공짜’라는 말은 “3D 프린터와 각종 부품, 그리고 이를 조립해낼 끈기는 각자 알아서 챙겨오라"는 뜻이기도 하다. 주방 조리대 위에 올려두고 바로 쓸 수 있는 가전제품이 아니라, 로봇 학습의 한계를 시험해보고 싶은 진지한 ‘빌더(Builder)‘들을 위한 기초 토대라는 점을 명심해야 한다. 혁신의 가장 큰 걸림돌이 하드웨어 수급이었던 지금의 상황에서, 이번 공개가 로봇 공학계에 어떤 파장을 일으킬지 업계의 이목이 쏠리고 있다.