로봇 함대에 세 번째 로봇을 추가하는 것이 시스템 전체의 붕괴를 의미한다면 어떨까요? 믿기 힘들겠지만, 현재 전 세계 로봇 공학 팀의 약 90%가 직면한 냉혹한 현실이 바로 이렇습니다. 중앙 제어 장치에 의존하고 대역폭 소모가 극심한 기존의 멀티 로봇 조정 방식은 그동안 로봇 공학계의 고질적인 병목 현상이었습니다. 하지만 최근 Oregon State University 연구진은 개미 군집의 소리 없는 지능처럼, 로봇들이 스스로 협력하는 미래를 위한 청사진을 제시했습니다.
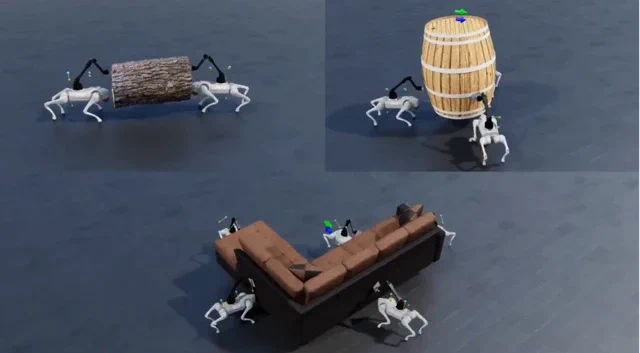
연구진의 최신 논문인 **decPLM (Decentralized Pinch-Lift-Move)**은 로봇 공학계의 ‘코첼라’ 헤드라이너급 위상을 가진 IEEE 국제 로봇 및 자동화 컨퍼런스(ICRA) 2026에 채택되었습니다. 이 시스템은 4족 보행 로봇들이 팀을 이루어 통나무, 드럼통, 심지어 소파처럼 손잡이도 없고 들기 까다로운 물체를 협동해서 들어 올리고 옮길 수 있게 해줍니다. 놀라운 점은 이 모든 과정에서 단 한 줄의 통신도 주고받지 않는다는 것입니다. 마스터 노드도, Wi-Fi도, 관절 레벨의 명령을 주고받는 긴박한 데이터 교환도 없습니다. 대신 로봇들은 자신이 운반하는 물체에 가해지는 힘을 ‘느낌’으로써 협업합니다. 오직 로봇 내부의 센서만을 활용하는 이른바 ‘고유 수용성 감각(proprioception)‘을 이용한 것입니다.
이 기술의 핵심은 이른바 ‘성좌 보상(Constellation Reward)’ 시스템으로 훈련된 공유 정책에 있습니다. 로봇들이 마치 화물에 단단히 고정된 것처럼 행동하도록 유도하는 방식입니다. 이러한 분산형 접근 방식은 놀라울 정도로 효율적이며 확장성이 뛰어납니다. 시뮬레이션에서는 단 두 대의 로봇으로만 훈련을 진행했지만, 실제로는 별도의 재학습 없이도 최대 10대의 팀까지 바로 적용할 수 있었습니다. 이는 로봇 수가 늘어날수록 네트워크 지연과 복잡성 때문에 시스템이 마비되던 기존의 ‘네트워킹 악몽’을 단번에 해결한 것입니다.
이것이 왜 중요한가?
이번 연구는 “로봇이 많아질수록 문제가 커진다"는 기존의 상식을 완전히 뒤집었습니다. decPLM 환경에서는 오히려 로봇이 많아질수록 오차가 줄어듭니다. 연구팀에 따르면, 로봇 함대를 2대에서 10대로 확장했을 때 화물 추적 오차가 무려 80%나 급감했습니다. 더 큰 팀이 가진 중복성이 개별 로봇의 실수를 자연스럽게 상쇄하여, 결과적으로 더 부드럽고 정교한 작업을 가능하게 만든 것입니다.
통신이라는 ‘지팡이’를 과감히 버림으로써, Oregon State University 연구진은 본질적으로 더 견고하고 확장이 용이하며 적응력이 뛰어난 시스템을 구축했습니다. 이는 물류 로봇 군단을 배치하는 것이 마치 그룹에 유닛 하나를 추가하는 것만큼이나 간단해지는 미래를 시사합니다. 전체 네트워크 구조를 새로 짤 필요도 없습니다. 원문에서 날카롭게 지적했듯, 이번 연구는 “이제 로봇 공학의 병목 현상은 하드웨어 성능이 아니라, ML 인프라에 달려 있다"는 사실을 다시 한번 입증했습니다.