폐쇄적인 하드웨어 엔지니어들이 기밀 유지 협약서(NDA)를 부여잡고 긴장할 만한 파격적인 소식이 전해졌습니다. 로보틱스 스타트업 **로보파티(Roboparty)**가 자사의 이족보행 로봇 Roboto_Original의 풀스택 소스 코드와 하드웨어 설계도를 전격 공개했습니다. 이번 행보는 업계 특유의 ‘비급(Secret Sauce)’ 문화에 정면으로 도전장을 내민 것으로, 로보파티 측은 이러한 오픈소스 모델이 신규 개발 팀들의 초기 비용을 무려 80%까지 절감해 줄 것이라고 자신했습니다.
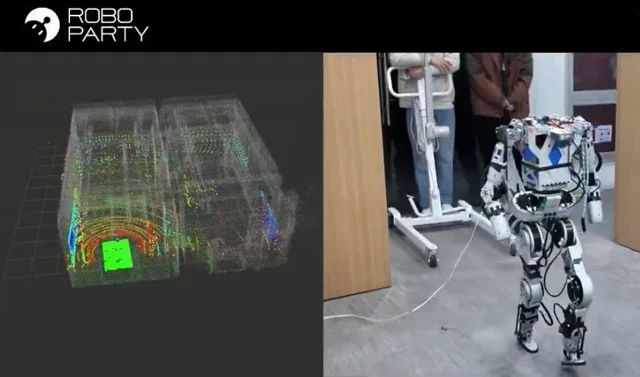
단순히 몇 개의 CAD 파일만 생색내듯 던져준 수준이 아닙니다. 로보파티는 그야말로 설계의 ‘속살’을 모두 드러냈습니다. 전체 구조 도면은 물론, 상세 전자 부품 명세서(EBOM), 공급업체 리스트, 그리고 핵심 기술인 AMP 모션 제어 알고리즘까지 포함되었습니다. 로봇 자체의 스펙도 상당합니다. 키 1.2m, 무게 30kg의 체구에 초속 3m(시속 약 10.8km)의 준수한 속도로 달릴 수 있습니다. 자동차 급의 구조 설계와 모듈형 관절을 채택해, 오픈소스 하드웨어도 충분히 고성능을 낼 수 있음을 증명했습니다. 특히 개발자들을 위해 SMPL-X 모델을 지원함으로써 인간의 모션 캡처 데이터를 직접 활용할 수 있게 했는데, 이는 보행 훈련(Gait Training) 과정을 획기적으로 단축할 수 있는 강력한 무기입니다.
이 소식이 왜 중요한가?
고성능 이족보행 플랫폼을 통째로 오픈소스화함으로써, 로보파티는 ‘바퀴를 다시 발명하느라’ 낭비되는 막대한 시간과 비용 문제를 정조준했습니다. 그동안 로보틱스 분야는 수많은 팀이 고립된 환경에서 기초적인 보행 기술과 하드웨어 이슈를 해결하기 위해 각자 수백만 달러를 쏟아붓는 파편화 현상을 겪어왔습니다.
이번 이니셔티브는 일종의 ‘공유 인프라’를 제공합니다. 연구자와 스타트업들이 기초적인 노가다(?) 작업에 매몰되지 않고, 단순한 ‘보여주기식 영상’을 넘어 실제 세상에 유용한 가치를 창출하는 데 집중할 수 있는 환경을 만든 것입니다. 만약 이 시도가 성공한다면, 구체화된 지능(Embodied Intelligence) 분야 전체의 성장을 가속화하는 거대한 협력 생태계가 구축될 것으로 보입니다.
로보틱스의 미래를 직접 ‘포크(Fork)‘해보고 싶은 개발자라면, 전체 프로젝트가 공개된 GitHub와 관련 문서를 확인해 보시기 바랍니다.












