
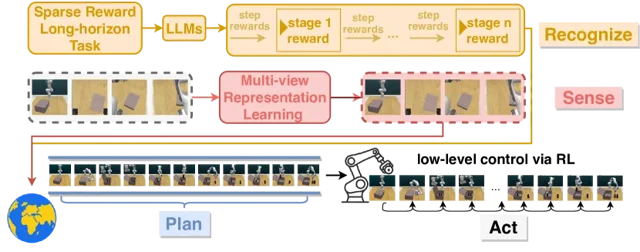
스웨덴 가구 디자이너들을 잔뜩 긴장시킬 만한 소식입니다. 연구진이 복잡하고 여러 단계를 거쳐야 하는 작업을 로봇이 수행하는 능력을 획기적으로 향상시키는 새로운 AI 프레임워크인 **로보호라이즌(RoboHorizon)**을 공개했습니다. 이 시스템은 대규모 언어 모델(LLM)을 일종의 ‘프로젝트 매니저’처럼 활용하여 모호한 지시를 달성 가능한 일련의 하위 작업으로 세분화하고, 로봇이 올바른 경로를 유지하도록 촘촘한 보상 구조를 생성합니다. 이 새로운 인지-감지-계획-실행(RSPA) 파이프라인은 장기적인 작업에서 성공률을 무려 29.23%나 향상시키는 드라마틱한 결과를 낳았습니다.
장기 로봇 공학의 핵심 문제는 작업에 주어지는 보상이 희소하다는 점입니다. 로봇은 복잡한 단계를 수십 번 거친 후에야 비로소 성공 여부를 알 수 있으므로, 어떤 특정 행동이 옳았는지 학습하기가 어렵습니다. 로보호라이즌은 LLM이 각 단계에 대한 보상이 포함된 상세한 체크리스트를 만들도록 함으로써 이 문제를 해결합니다. 이는 로봇이 작업의 가장 중요한 순간, 예를 들어 그리퍼가 물체와 접촉하는 순간처럼 결정적인 시점에 시각 시스템을 집중하도록 돕는 “키프레임 발견” 방식과 결합됩니다. 마치 로봇이 산만해지지 않고 설명서를 꼼꼼히 읽는 것과 같은 로봇판 ‘정신 차리기’라고 할 수 있죠.
이러한 로보호라이즌의 능력은 퍼니처벤치(FurnitureBench) 벤치마크에서 가장 분명하게 드러났습니다. 이 벤치마크는 이케아(IKEA) 가구 조립에서 영감을 받은 일련의 작업들로, 자율 시스템에게는 특별히 골칫덩이로 설계된 시험대입니다. 이 테스트는 장기적인 계획, 정밀한 조작, 그리고 여러 부품을 올바르게 연결하는 능력을 요구하는데, 이는 현재 많은 모델을 좌절시키는 난제입니다. 로보호라이즌의 성공은 지금까지는 인간의 전유물이자 고통스러운 영역이었던 복잡한 실제 조립 작업을 로봇이 처리할 수 있도록 하는 중요한 진전을 보여줍니다.
왜 이것이 중요할까요?
이 연구는 진정으로 유용하고 범용적인 로봇을 만드는 데 있어 근본적인 장벽을 허뭅니다. LLM의 추상적인 계획 능력과 로봇 세계 모델의 물리적 실행을 통합함으로써, 로보호라이즌은 복잡한 잡무를 안정적으로 완료할 수 있는 기계를 위한 청사진을 제공합니다. 단일하고 반복적인 행동에 국한되지 않고, 이 접근 방식은 로봇이 공장, 연구실, 심지어 가정에서도 다단계 작업을 계획하고, 적응하며, 실행할 수 있는 길을 열어줍니다. 유능한 로봇 비서라는 꿈에 한 발짝 더 가까이 다가서는 거대한 도약인 셈이죠.












