
휴머노이드 로봇 업계의 ‘보여주기식’ 경쟁이 이제는 피로감을 줄 정도입니다. 몇 주가 멀다 하고 매끈하게 제작된 영상들이 쏟아집니다. 이족 보행 로봇이 반짝이는 몸체를 뽐내며 무언가를 수행하죠. 감탄이 나올 만큼 우아하면서도, 한편으로는 이것이 여전히 ‘프로토타입’임을 상기시키듯 위태로운 흔들림을 동반한 채 말입니다. 하지만 업계 대부분이 바이럴 영상 제작에 혈안이 되어 있을 때, 텍사스 오스틴에 본사를 둔 Apptronik은 신형 휴머노이드 Apollo 2를 공개하며 신선하면서도 지독히 현실적인 메시지를 던졌습니다. “이 로봇은 진짜 ‘일’을 하기 위해 태어났다"는 것이죠.
백덤블링이나 파쿠르 같은 묘기는 잊으셔도 좋습니다. Apollo 2는 창고 물류와 제조 라인이라는, 고되고 화려함과는 거리가 먼 현장의 현실에 맞춰 설계되었습니다. Apptronik의 행보는 마치 쇼맨십에 치중하는 경쟁사들을 향해 날리는 묵직한 ‘돌직구’처럼 보입니다. 공상과학 영화 같은 미래를 약속하는 대신, 그들은 도구를 제안합니다. 다재다능하고 확장 가능하며, 무엇보다 신뢰할 수 있는 도구 말이죠. 어쩌면 이 로봇이 휴머노이드에 대한 환상과 실제 효용성 사이의 간극을 메울 열쇠가 될지도 모르겠습니다.
NASA의 실험실에서 공장 바닥으로
Apptronik은 어느 날 갑자기 이족 보행 기술을 들고 나온 신생 스타트업이 아닙니다. 텍사스 대학교 오스틴 교내의 ‘인간 중심 로보틱스 연구소(Human Centered Robotics Lab)‘에서 스핀오프된 이 회사는 화려한 뼈대를 갖추고 있습니다. 무려 NASA와 함께 휴머노이드 로봇 ‘발키리(Valkyrie)‘를 제작했던 팀이니까요. 복잡한 현실 세계의 로봇 공학 문제를 해결해 온 이들의 깊은 내공은 Apollo 2의 디자인에 그대로 녹아 있습니다. 화려함보다는 기능에 철저히 우선순위를 둔 모습입니다.
Apollo 2의 키는 약 172cm(5피트 8인치), 무게는 약 72kg(160파운드)이며, 약 25kg(55파운드)의 무게를 들어 올릴 수 있습니다. 수치만 놓고 보면 천지를 개벽할 수준은 아니지만, 인간을 위해 설계된 환경에서 인간이 수행하는 작업을 대체하기에는 더할 나위 없이 최적화된 ‘스펙’입니다. 하지만 진짜 천재성은 힘이 아니라 ‘지구력’에 있습니다. Apollo 2는 교체 가능한 배터리를 장착해 약 4시간 동안 가동됩니다. 이를 통해 Apptronik이 강조하는 ‘7x22 운영’이 가능해집니다. 배터리만 신속하게 교체하면 로봇이 즉시 현장에 복귀하므로, 가동 중지 시간(downtime)은 줄이고 생산성은 극대화할 수 있습니다. 로봇계의 ‘무선 전동 드릴’이라고나 할까요? 이는 최고의 찬사입니다.
정체성 혼란? 오히려 좋아 (모듈형의 미학)
Apollo 2의 가장 돋보이는 특징은 단연 ‘모듈화’입니다. Apptronik은 로봇 공학계의 공공연한 비밀을 정확히 꿰뚫고 있습니다. 바로 “다리(Legs)는 멋지지만, 바퀴(Wheels)가 훨씬 효율적일 때가 많다"는 사실이죠. 장애물이 많고 역동적인 인간의 환경을 누비기 위해선 이족 보행이 필수적이지만, 평탄하고 예측 가능한 현대식 창고 바닥에서는 바퀴가 훨씬 빠르고 안정적이며 에너지 효율도 압도적입니다.
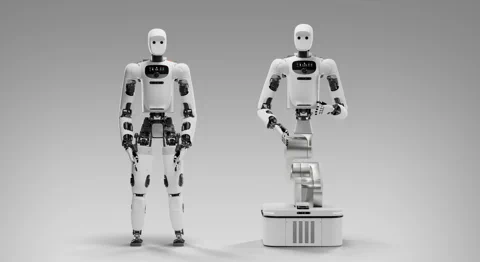
Apollo 2는 이 두 가지 선택지를 모두 제공합니다. 고객은 완전한 이족 보행 형태를 선택할 수도 있고, 상체(torso)를 바퀴형 베이스에 장착한 버전을 고를 수도 있습니다. 이러한 이원화 전략은 실용주의의 정점이라 할 수 있습니다. 물류 시장에는 맞춤형 솔루션으로 즉각 대응하는 동시에, 더 넓은 범용성을 가진 이족 보행 플랫폼을 지속적으로 발전시킬 수 있기 때문입니다. 모든 문제에 억지로 ‘다리’를 갖다 붙이는 것이 비효율적일 뿐만 아니라 나쁜 비즈니스라는 점을 쿨하게 인정한 셈입니다.
상호작용 측면에서도 Apptronik의 고민 흔적이 역력합니다. 표정을 짓는 듯한 LED ‘입’과 가슴에 장착된 디스플레이는 작업 상태, 배터리 잔량, 시스템 상황 등을 한눈에 보여줍니다. 이는 로봇을 속을 알 수 없는 ‘블랙박스’가 아니라, 예측 가능한 ‘동료’로 느끼게 하려는 배려입니다.
육체미를 완성하는 지능
아무리 뛰어난 하드웨어도 강력한 두뇌 없이는 고철에 불과합니다. Apollo 2는 인지부터 동작 계획까지 모든 것을 처리하는 온보드 제어 소프트웨어 Artemis를 탑재했습니다. 또한 대규모 도입 시에는 Fleet Connect를 통해 단일 인터페이스에서 로봇 군단 전체를 관리하고 조율할 수 있는 운영 툴킷을 제공합니다.
하지만 Apollo 지능의 진정한 하이라이트는 Google DeepMind와의 협업입니다. Apptronik은 Apollo를 차세대 ‘물리적 인공지능(Embodied AI)‘을 위한 최적의 플랫폼으로 포지셔닝하고 있습니다. 선도적인 AI 연구진에게 하드웨어를 제공함으로써, Gemini와 같은 최첨단 모델을 활용해 Apollo에게 고도의 추론 및 학습 능력을 부여하겠다는 전략입니다. Apptronik은 세계 최고 수준의 하드웨어를 만들고, Google 등은 그 하드웨어에 생명력을 불어넣을 AI의 한계를 시험하는 공생 관계인 셈입니다.
안전성 또한 놓치지 않았습니다. 접촉 시 즉시 동작을 멈추는 하드웨어 수준의 ‘임팩트 존(impact zones)‘과 주변 사람이나 장애물에 따라 행동을 조절하는 소프트웨어 기반의 ‘페리미터 존(perimeter zones)‘이 촘촘하게 설계되어 있습니다.
마침내 ‘출근’하는 휴머노이드의 등장인가?
현재 휴머노이드 시장은 그야말로 전쟁터입니다. BMW와 손잡은 Figure, 완전히 전동화된 신형 Atlas를 선보인 Boston Dynamics, 그리고 여전히 거대한 존재감을 과시하는 Tesla의 Optimus까지. 그럼에도 Apollo 2는 결이 다르게 느껴집니다. 모든 디자인 선택지가 실제 현장 배치, 확장성, 가동 시간이라는 지극히 실무적인 질문에 답하고 있기 때문입니다. 대량 생산 가능성과 공급망 회복 탄력성에 집중하는 모습은 연구비 지원이나 파일럿 프로그램 수준을 넘어선 야심을 보여줍니다.
아직 가격은 공개되지 않았고, 이는 업계 전체가 직면한 ‘10억 달러짜리 질문’으로 남아 있습니다. 하지만 모듈화, 지구력, 그리고 미래의 공상과학적 꿈이 아닌 ‘오늘의 노동력 부족’을 해결하겠다는 Apollo 2의 철학은 Apptronik이 단순한 로봇이 아닌 ‘제품’을 만들고 있음을 시사합니다. 그리고 장기적으로 볼 때, 그것이야말로 가장 놀라운 성취가 될 것입니다.