때는 2035년. 당신은 300대의 휴머노이드 로봇이 정적 속에서 일사불란하게 업무를 수행하는 거대한 공장 한복판에 서 있습니다. 모든 것이 완벽해 보이지만, 딱 하나 문제가 있습니다. 로봇 300대를 각각 조종할 리모컨 300개가 당신 손에 들려 있다는 사실이죠. 이 리모컨들을 이어 붙여 거대 로봇 슈트라도 만들려 했던 당신의 야심 찬 계획은 이미 인사팀(HR)으로부터 수차례 경고를 먹었습니다. 사실 웃픈 농담 같지만, 대규모 로봇 군단을 관리하는 물류 시스템은 자동화된 미래로 가기 위해 반드시 넘어야 할, 가장 지루하면서도 거대한 장벽 중 하나입니다. 만약 손가락 하나 까딱하지 않고, 그저 ‘생각’만으로 이 모든 로봇을 부릴 수 있다면 어떨까요?
이것은 SF 스릴러의 도입부가 아닙니다. 새로운 오픈소스 프로젝트 Kinexus가 해결하고자 하는 실제 과제입니다. 뉴럴링크(Neuralink)처럼 뇌에 칩을 심는 침습형 인터페이스(BCI)가 세상을 떠들썩하게 만들고 있는 요즘, Kinexus는 조금 더 접근하기 쉬운 길을 택했습니다. 바로 비침습형 EEG(뇌파) 헤드셋을 이용해 사용자의 생각과 음성 명령을 휴머노이드 로봇 군단의 행동으로 번역하는 것이죠. 수술대에 오를 필요 없이, 인간의 정신과 로봇 노동력 사이에 실용적이고 확장 가능한 가교를 놓겠다는 야심찬 시도입니다.
로봇 제어의 ‘확장성 위기’
공장과 창고에 휴머노이드 로봇 도입이 가속화되면서, 운영 측면에서는 뼈아픈 현실에 직면했습니다. 작업자 한 명이 로봇 한 대를 맡는 ‘1:1 모델’은 도저히 수지타산이 맞지 않습니다. 현재의 제어 방식은 복잡한 소프트웨어 인터페이스를 거치거나, 로봇 하나하나를 직접 프로그래밍해야 하는 투박한 ‘티치 펜던트(teach pendant)’ 방식에 머물러 있습니다. 이는 로봇이 제공해야 할 효율성을 오히려 갉아먹는 병목 현상을 만듭니다. 로봇 몇 대를 관리하는 건 기술의 영역이지만, 수백 대를 동시에 운용하는 건 물류의 재앙에 가깝습니다.
여기서 중앙 집중식의 직관적인 커맨드 센터라는 개념이 등장합니다. 업계에는 물리적 자산들을 한눈에 파악하고 조율할 수 있는 일종의 ‘컨트롤 플레인(control plane)‘이 절실합니다. Kinexus는 가장 직관적인 유저 인터페이스가 이미 우리 몸에 장착되어 있다고 주장합니다. 바로 인간의 ‘뇌’입니다.
Kinexus: 당신의 뇌가 곧 대시보드다
Kinexus의 핵심은 사용자와 로봇 군단 사이에서 실시간 통역사 역할을 하는 제어 대시보드입니다. AI 개발자 Mourad Ouazmour가 파이썬(Python)을 기반으로 개발한 이 시스템은 공장 자동화를 위한 ‘중추 신경계’ 역할을 하도록 설계되었습니다. 시중에서 구할 수 있는 EEG 헤드셋으로부터 들어오는 뇌 신호를 시각화하고, 이를 구체적인 명령으로 번역하며, 공장 전체의 상황을 매핑하여 보여줍니다.
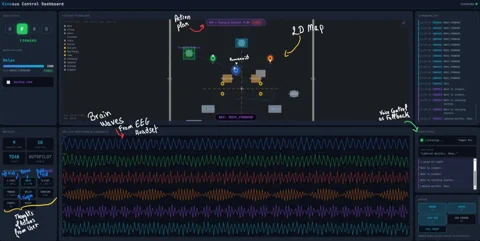
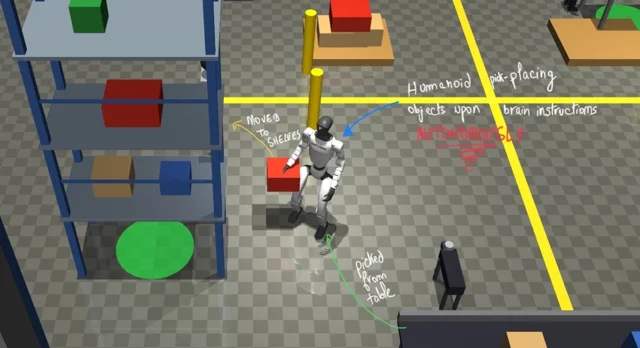
제어 방식은 놀라울 정도로 직접적입니다. 개발자의 설명에 따르면, 사용자가 오른주먹을 꽉 쥐면 로봇이 오른쪽으로 돌고, 양주먹을 모두 쥐면 앞으로 걸어갑니다. 심지어 혀를 차는 동작으로 모드를 전환할 수도 있습니다. 대시보드는 이 과정을 실시간으로 중계합니다:
- EEG 실시간 파형(Live Waveform): 뇌의 전기적 활동을 채널별로 분리하여 보여주는 실시간 스트림입니다.
- 메서드 패널(Methods Panel): 일종의 번역 엔진입니다. 주먹을 쥐는 것과 같은 특정 심상(mental cue)을 ‘MOVE_LEFT’나 ‘MOVE_FORWARD’ 같은 로봇의 동작으로 매핑합니다.
- 공장 평면도(Factory Floor Map): 각 휴머노이드 로봇의 위치, 상태, 현재 수행 중인 작업 계획을 보여주는 2D 도면입니다.
- 음성 폴백(Voice Fallback): 직접적인 텔레파시(?)보다 더 복잡하고 자율적인 작업이 필요할 때 사용합니다. 사용자가 “컨베이어에서 박스를 집어서 2번 팔레트에 놓아줘"라고 말하면, 지정된 로봇이 스스로 경로를 찾아 전체 시퀀스를 실행합니다.
SF적 야심과 오픈소스라는 현실
비침습형 EEG로 로봇을 제어하는 개념 자체가 완전히 새로운 것은 아닙니다. 하지만 이를 ‘군단 관리(fleet management)‘라는 맥락에 적용했다는 점이 Kinexus를 돋보이게 합니다. 그동안의 EEG 제어 연구가 주로 장애인 보조 공학이나 단일 로봇 제어에 집중해 왔다면(정확도는 방식에 따라 70%에서 90% 이상), Kinexus는 이 기술을 연구실 밖 공장 현장으로 끌어내려 합니다.
무엇보다 Kinexus의 가장 큰 무기는 깃허브(GitHub)에 공개된 오픈소스 프로젝트라는 점입니다. 이는 첨단 제어 패러다임에 대한 접근성을 민주화합니다. 거대 로봇 기업이 만든 폐쇄적인 제품이 아니라, 누구나 실험하고 개선하며 OpenBCI 같은 오픈소스 하드웨어와 통합할 수 있는 도구 모음인 셈입니다. 덕분에 전 세계 개발자 커뮤니티가 EEG 제어의 고질적 문제인 신호 노이즈나 사용자별 캘리브레이션 문제를 함께 해결할 수 있는 길이 열렸습니다.
물론 깃허브 저장소에 있는 코드가 당장 내일 아침 공장을 지배할 수는 없습니다. 비침습형 EEG는 침습형에 비해 해상도가 낮고, 산업 현장에서 요구하는 99% 이상의 신뢰도를 확보하는 것은 여전히 거대한 도전 과제입니다. 하지만 Kinexus는 완성된 제품을 파는 것이 아니라, 강력하고 대담한 ‘아이디어’를 제시하고 있습니다. 자동화된 환경에서 인간의 감시가 더 이상 ‘미친 듯이 버튼을 누르는 것’이 아니라, ‘집중된 전략적 의도’를 전달하는 일이 되는 미래 말입니다. 수백 대의 로봇을 관리하는 것이 스치듯 지나가는 생각만큼 쉬워질 날이 머지않아 보입니다.