로봇 손을 직접 만들어 보려고 시도해 본 적이 있다면, 그것이 얼마나 지독한 엔지니어링 악몽인지 잘 아실 겁니다. 인간 손의 섬세하고 유연한 움켜쥠을 재현하는 것은 로봇공학의 ‘최종 보스’ 중 하나죠. 핵심 난제는 단순히 관절을 더 많이 추가하는 데 있는 것이 아닙니다. 불규칙한 모양의 물체에도 적응하면서도, 모든 관절 지점마다 무겁고 전력 소모가 심한 모터를 필요로 하지 않는 시스템을 만드는 것이죠. 대부분의 디자인은 너무 경직되어 있거나, 너무 복잡하거나, 아니면 현실 세계에서 쓰기엔 너무나 연약합니다.
여기에 테슬라가 등장합니다. 최근 공개된 옵티머스 2세대 손에 대한 특허 출원(WO2024/073138A1)은 그들의 디자인 철학의 베일을 벗겨냈는데, 이는 그야말로 ‘잔혹한 효율성’의 진수를 보여줍니다. 복잡성을 쫓는 대신, 테슬라 엔지니어들은 기발한 물리 법칙, 견고한 역학, 그리고 “데모용이 아닌, 제조를 위해 태어났다!“라고 외치는 듯한 디자인 정신에 기대고 있습니다.
언더액츄에이티드 방식의 결정적 우위
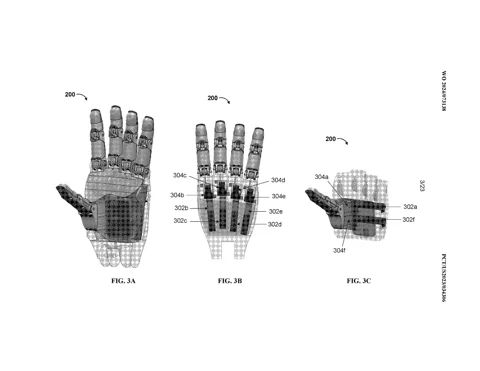
테슬라 디자인의 핵심은 바로 ‘언더액츄에이티드(underactuated)’ 시스템입니다. 이는 전체 관절 수보다 적은 수의 모터를 사용하는 개념이죠. 옵티머스 손의 경우, 6개의 액츄에이터가 11개의 관절을 구동합니다. 엄지손가락에 2개, 나머지 네 손가락에 각각 1개씩 배정되죠. 이는 생체 힘줄처럼 작동하는 케이블 구동 시스템으로 가능해집니다. 각 손가락을 가로지르는 하나의 케이블이 당겨지면, 관절들이 자연스럽고 순차적인 움직임으로 오므라들게 됩니다.
이러한 접근 방식은 적응성 문제를 해결합니다. 관절들이 경직되고 미리 정해진 경로로 강제되지 않기 때문에, 손가락들은 전동 드릴이든 깨지기 쉬운 달걀이든, 물체의 형태에 수동적으로 맞춰질 수 있습니다. 이는 복잡한 움켜쥠 계산을 소프트웨어에서 하드웨어 자체로 넘겨버리는 일종의 “기계적 지능"인 셈이죠.
하지만 테슬라 엔지니어들은 여기에 결정적인 묘수를 추가했습니다. 각 손가락의 기저 관절에 있는 토션 스프링을 손가락 끝 관절보다 의도적으로 더 단단하게 만든 것이죠. 이는 약한 손가락 끝 관절이 먼저 구부러져 물체를 감싸고, 이어서 더 강한 기저 관절이 따라 구부러지는 “수동적 지능"을 만들어냅니다. 로봇의 중앙 프로세서가 머리 싸맬 필요 없이, 견고하게 물체를 “감싸 쥐는” 움켜쥠을 자동으로 보장하는 방식입니다.
웜 드라이브: 무거운 짐을 ‘공짜’로 붙잡는 비결
아마도 이 특허에 숨겨진 가장 천재적인 엔지니어링 조각은 액츄에이터에 사용된 웜 기어와 웜 휠 트랜스미션일 겁니다. 이는 단순히 모터의 회전을 케이블 당김으로 바꾸는 것을 넘어섭니다. 효율성에 엄청난 파급 효과를 가져올 ‘물리 법칙 해킹’이라고 할 수 있죠.
웜 드라이브는 일반적으로 “역구동 불가능(non-backdrivable)“합니다. 높은 마찰과 가파른 기어 톱니 각도 때문에, 출력 휠이 입력 웜 기어를 회전시킬 수 없죠. 로봇에게 이것은 그야말로 초능력입니다. 옵티머스가 무거운 물체를 움켜쥐면, 기어들이 기계적으로 그립을 고정시킵니다. 그러면 모터는 완전히 전력을 해제하고도, 단 1와트의 전력 소모 없이 무게를 지탱할 수 있습니다. 중력과 싸우기 위해 끊임없이 에너지를 소모해야 하는 직접 구동(direct-drive) 방식의 손과 비교하면, 이는 배터리 수명과 열 관리 측면에서 기념비적인 승리입니다.
이러한 설정은 또한 단일의 소형 단계에서 엄청난 기어 감속비를 제공하여, 작고 고속인 모터가 뼈를 으스러뜨릴 듯한 악력을 생성하면서도 손바닥 안에 깔끔하게 통합될 수 있도록 합니다.
현실 세계를 위해 태어나다: 내구성과 정밀함
종이 위에서 아무리 훌륭한 디자인이라도, 수천 번의 작동 후 고장 난다면 무용지물입니다. 이 특허는 장기적인 신뢰성에 대한 테슬라의 깊은 집착을 여실히 보여줍니다.
케이블 구동 시스템에서 가장 큰 고장 지점 중 하나는 케이블 피로와 늘어짐입니다. 테슬라는 두 가지 기발한 해결책으로 이 문제를 정면 돌파했습니다.
- 볼록 곡면 묘수: 케이블이 관절 위에서 급격하게 꺾이는 대신, 손가락 링크 사이에 부드러운 볼록 곡면이 성형되어 있습니다. 이는 케이블이 안전한 곡률 반경으로 구부러지도록 유도하여, 케이블의 수명을 획기적으로 연장시킵니다.
- 자동 장력 조절기: 손가락 끝 안쪽에는 케이블 끝을 지속적으로 당겨주는 스프링 장치 메커니즘이 숨겨져 있습니다. 이는 시간이 지남에 따라 케이블이 늘어지는 느슨한 부분을 자동으로 잡아주어, 수동적인 유지보수 없이도 수년간 손이 팽팽하고 반응성을 유지하도록 보장합니다.
센싱(감지)을 위해, 테슬라는 부피가 크고 고장 나기 쉬운 기계식 센서를 과감히 버렸습니다. 대신, 각 관절의 피벗 주변에 영구 링 자석이 통합되어 있습니다. 고정된 홀 효과 센서가 관절이 회전함에 따라 변하는 자기장을 측정하여, 정밀하고 마찰이 없으며 마모가 발생하지 않는 각도 감지 기능을 제공합니다. 이러한 비접촉 방식은 수백만 번의 작동 주기 동안 서브 밀리미터(sub-millimeter) 정확도를 유지하는 데 결정적인 역할을 합니다.
단순한 손이 아닌, 하나의 철학
이 특허의 밀도 높은 기술 용어를 훑어보면, 한 가지 분명한 그림이 떠오릅니다. 테슬라는 실험실에서 호기심으로 만들 법한 물건을 만드는 것이 아닙니다. 지저분하고 예측 불가능한 현실 세계에 대량 생산 및 배치를 목표로 하는 제품을 설계하고 있습니다. 역구동 불가능한 기어부터 자동 장력 조절 힘줄에 이르기까지, 모든 결정은 효율성, 내구성, 그리고 제조 용이성을 위해 최적화되어 있습니다.
다른 휴머노이드 로봇들이 더 많은 자유도나 이국적인 액츄에이터를 자랑할 수도 있겠지만, 옵티머스 손은 로봇 조작의 핵심 문제를 가장 단순하고 견고한 방식으로 해결하는 데 집중한 실용적인 접근 방식을 대변합니다. 이는 현실 세계에서 신뢰성과 효율성이 항상 화려한 복잡성보다 우위에 선다는 것을 이해하는 디자인입니다. 그리고 바로 그것이, 그 어떤 단일 기능보다 이 디자인을 그토록 매력적으로 만드는 이유입니다.
