솔직히 말해봅시다. Microsoft라는 이름을 들었을 때, 보통 우리 머릿속에 떠오르는 건 전 세계 데스크톱을 지배하는 소프트웨어지, 그 소프트웨어를 만드는 로봇은 아닐 겁니다. 사실 Microsoft의 로봇 잔혹사는 꽤 뿌리가 깊습니다. 2006년 당시 ‘로봇계의 윈도우’를 꿈꾸며 야심 차게 내놓았던 Microsoft Robotics Developer Studio를 기억하시나요? 아마 기억 한구석에 먼지만 쌓인 채 잊혔을 겁니다. 명분은 훌륭했지만, 당시 시장이 받아들이기엔 너무 앞서갔거나 혹은 갈 곳을 잃은 플랫폼이었죠.
하지만 지금은 2026년입니다. 세상이 완전히 바뀌었습니다. OpenAI와의 강력한 동맹으로 무장한 Microsoft는 이제 단순한 소프트웨어 거물이 아닌, AI라는 거대한 괴물이 되었습니다. 그리고 이제 로봇 공학이라는 전장에 훨씬 더 야심 찬 출사표를 던지고 있습니다. 이번에는 단순한 개발자 키트 수준이 아닙니다. 공장의 다관절 로봇 팔부터 인간형 비서(Humanoid)까지, 모든 기계에 생명력을 불어넣을 단 하나의 ‘범용 두뇌’—즉, 물리적 세계를 위한 파운데이션 모델을 구축하려 합니다. 디지털 지능과 물리적 행동 사이의 간극을 메우는 이른바 ‘체화된 AI(Embodied AI)‘라는 난제에 정면 승부를 건 셈입니다.
언어 모델을 넘어 ‘물리적 AI’의 시대로
오랫동안 로봇은 ‘통제된 환경’ 안에서만 유능했습니다. 자동차 조립 라인은 로봇에게 천국과도 같죠. 모든 부품은 정해진 위치에 있고, 작업은 무한 반복되며, 오차는 허용되지 않습니다. 하지만 그 로봇을 안전한 울타리 밖으로 꺼내 혼란스럽고 예측 불가능한 인간의 세상에 던져놓는 순간, 로봇은 그저 ‘비싼 고철 덩어리’로 전락하고 맙니다. Microsoft가 해결하려는 지점이 바로 여기입니다.
Microsoft의 핵심 전략은 GPT-4와 같은 모델을 강력하게 만든 원리를 로봇에 이식하는 ‘물리적 AI(Physical AI)‘입니다. 이 프로젝트의 새로운 주인공은 Rho-alpha입니다. Microsoft의 경량 모델인 Phi 시리즈(시각-언어 모델)를 기반으로 구축된 최초의 로봇 전용 모델이죠. Microsoft Research의 부사장 애슐리 로렌스(Ashley Llorens)는 이에 대해 “구조화되지 않은 환경에서 인간과 함께 스스로 인지하고, 판단하며, 행동하는 자율 시스템을 구현하는 것이 목표"라고 설명합니다.
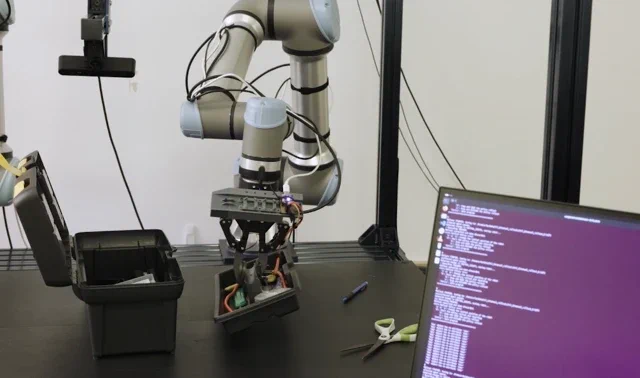
쉽게 말해, 단순히 “파란 상자를 집어 들어"라는 명령을 알아듣는 수준을 넘어, 물건을 들어 올리는 물리적 원리를 이해하고, 상자를 뭉개뜨리지 않아야 한다는 ‘상식’을 갖추며, 상자의 위치가 살짝 바뀌어도 유연하게 대처하는 지능을 만들겠다는 것입니다. 딱딱하게 프로그래밍된 지시어에서 벗어나, 물 흐르듯 유연한 지능으로의 진화입니다.
VLA+의 핵심 무기: ‘촉각’을 깨우다
Rho-alpha의 진정한 비장의 무기는 Microsoft가 ‘VLA+(Vision-Language-Action Plus)‘라고 부르는 아키텍처에 있습니다. Google DeepMind 같은 경쟁사들이 주로 시각과 언어(VLA)에 의존하는 것과 달리, Rho-alpha는 여기에 ‘촉각’이라는 결정적인 감각을 더했습니다. 촉각 센서를 통합함으로써 로봇은 물체와의 접촉 상태를 정밀하게 파악할 수 있게 되었고, 시각만으로는 거의 불가능했던 전선 꽂기나 다이얼 돌리기 같은 섬세한 조작이 가능해졌습니다.
물론 이런 모델을 만드는 데 있어 가장 큰 걸림돌은 데이터의 절대적 부족입니다. 인터넷을 긁어모은다고 해서 로봇이 드라이버를 집어 드는 수조 개의 데이터가 나오지는 않으니까요. Microsoft는 이 문제를 ‘시뮬레이션’으로 돌파하고 있습니다.
NVIDIA의 로봇 및 엣지 AI 부문 부사장 디푸 탈라(Deepu Talla)는 “추론하고 행동하는 파운데이션 모델을 학습시키려면 현실 세계의 희소한 데이터를 극복해야 한다"며, “Azure 환경에서 NVIDIA Isaac Sim을 활용해 물리적으로 정확한 합성 데이터를 생성함으로써, Microsoft Research는 Rho-alpha와 같은 다재다능한 모델 개발을 가속화하고 있다"고 밝혔습니다.
시뮬레이션에서 생성된 합성 데이터와 실제 물리적 시연 데이터를 결합하는 것이 대규모 학습의 핵심입니다. 로봇이 실수를 하면 인간 운영자가 3D 마우스로 교정해주고, 시스템은 그 피드백을 실시간으로 학습하며 진화합니다.
체화된 지능을 위한 ‘운영 체제’
Microsoft의 이 시도가 성공한다면 그 파급력은 어마어마할 것입니다. 범용 로봇 모델은 하드웨어를 위한 ‘클라우드 기반 운영 체제’ 역할을 하게 됩니다. 이제 모든 로봇 회사가 각자 복잡한 AI 스택을 처음부터 쌓을 필요가 없습니다. Microsoft의 고성능 파운데이션 모델을 라이선스 받아 사용하고, 자신들은 더 나은 하드웨어를 만드는 데 집중하면 됩니다. 이는 로봇 산업의 진입 장벽을 획기적으로 낮추고, 마치 ‘캄브리아기 대폭발’처럼 온갖 형태와 용도의 로봇이 쏟아져 나오는 계기가 될 수 있습니다.
물론 이 시장은 이미 테크 거물들의 전쟁터입니다. NVIDIA는 강력한 AI 하드웨어와 Omniverse 시뮬레이션 플랫폼을 앞세운 ‘Project GR00T’로 생태계 장악을 노리고 있습니다. Tesla는 자율주행 데이터의 정수를 담은 ‘Optimus’를 통해 수직 계열화된 접근 방식을 취하고 있으며, Google은 이미 이 분야의 오랜 연구 전통을 가진 강자입니다.
Microsoft의 전략은 철저히 ‘플랫폼 플레이’에 맞춰져 있습니다. Rho-alpha를 얼리 액세스 프로그램과 Microsoft Foundry를 통해 공개하며 파트너들이 자사의 기반 위에서 마음껏 뛰어놀도록 유도하고 있죠. Azure 클라우드 인프라라는 압도적인 체급을 등에 업은 이 협력적 모델이 Microsoft의 가장 강력한 무기입니다.
범용 로봇의 꿈은 여전히 멀어 보일지도 모릅니다. 현실 세계의 물리 법칙, 안전 문제, 그리고 비용이라는 거대한 벽이 버티고 있으니까요. 하지만 처음으로 소프트웨어가 그럴듯한 해답을 내놓기 시작했습니다. Microsoft의 “물리적 AI"를 향한 야심 찬 질주는 단순한 연구 프로젝트가 아닙니다. 차세대 기계들의 ‘두뇌’를 누가 차지할 것인가를 두고 벌어지는 이 거대한 전쟁에서, Microsoft가 가장 강력한 우승 후보로 급부상했다는 명확한 신호입니다.












