ロボットの指先といえば、これまではまるで「金槌」のように不器用なのが当たり前でした。しかし今、その常識を覆す新たなフレームワークが登場しました。皮肉にもT-Rex(ティラノサウルス)と名付けられたこのプロジェクトは、マシンに欠落していた決定的な感覚——「リアクティブな触覚」を授けるものです。
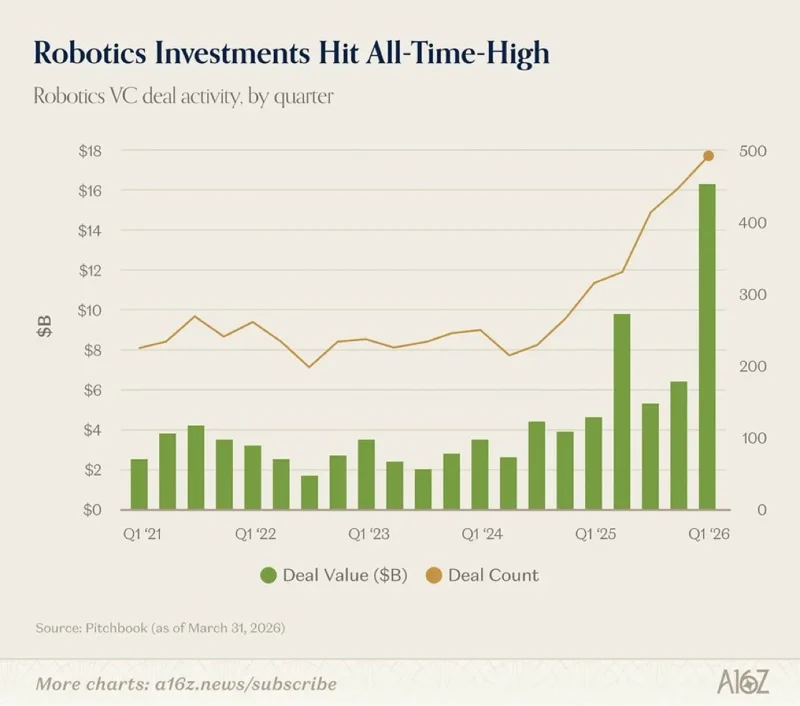
UC Berkeley、NVIDIA、Stanfordといったアカデミアと業界の巨頭たちが共同開発したこのシステムは、従来の視覚のみに頼るモデルと比較して、複雑な操作タスクの成功率を30%も向上させました。これは単なる微増ではありません。ロボットが物理世界と対話する方法における、決定的なパラダイムシフトと言えるでしょう。
現在主流のVision-Language-Action(VLA)モデルを搭載したロボットは、対象物に触れた瞬間、事実上の「盲目」状態に陥ります。見て、計画し、動くことはできても、物体が滑り落ちそうになったり、形が歪んだりする感覚を「感じる」ことができないからです。T-Rexは、高周波の触覚フィードバックを意思決定ループに直接組み込むことで、この問題を解決しました。さらに、チームは100時間分におよぶ膨大な触覚同期データセット(200種類以上の物体、7,700以上の軌道データ)を公開。これまでこの分野で決定的に不足していた「経験」をコミュニティに共有しました。
この技術の核心は、新たに開発された**Mixture-of-Transformers (MoT)**アーキテクチャにあります。これはロボットの「脳」を賢く分割する設計で、低周波のエキスパートが全体的な視覚プランニングを担当する一方で、専用の高周波エキスパートが絶え間なく流れ込む触覚データを処理し、リアルタイムで動きを微調整します。
その成果は驚くべきものです。電球をねじ込む、生卵を割らずに運ぶ、あるいは山札からトランプを1枚だけ抜き取る——人間には造作もないことですが、触覚のないマシンにとっては悪夢のようなタスクを、T-Rexはいとも簡単にこなしてみせます。特筆すべきは、データセット、モデル、トレーニングコードのすべてが完全オープンソース化されている点です。これにより、世界中の研究者がこの「器用なロボティクス」の新たな基盤の上に、さらなる革新を積み上げることが可能になります。
なぜこれが重要なのか?
長年、ロボットによる物体操作は「見た目は派手だが、実は不器用」というループから抜け出せずにいました。触覚を無視するということは、いわば「厚手のオーブンミトンをはめたままIKEAの家具を組み立てる」ような無理難題をロボットに強いていたのです。
T-Rexの成功は、触覚センサーが贅沢品ではなく、人間レベルの器用さを実現するための「必須条件」であることを証明しました。100時間のデータセットからMoTアーキテクチャまで、スタック全体をオープンソース化したことは、真のゲームチェンジャーとなるでしょう。これは研究の障壁を劇的に下げ、物理世界を繊細に扱えるロボットの「カンブリア爆発」を引き起こす可能性を秘めています。ロボットがただ物を掴んで置くだけの存在から、ついに自らの「手」で仕事をこなす存在へと進化するための、大きな一歩なのです。