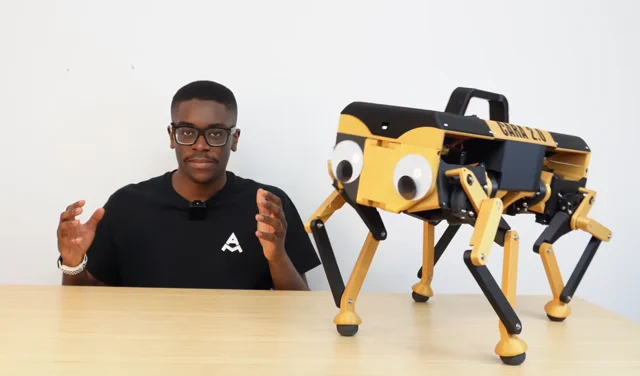
メイカーでありYouTuberとしても活動するAaed Musaが、あのユニークなロープ駆動型ロボット犬のアップデート版を引っ提げて帰ってきた。そして、今回叩き出された数字は実に驚異的だ。
大学の卒業制作(キャップストーン・プロジェクト)として開発された新型「CARA 2.0」は、先代モデルの課題を鮮やかにクリアしている。製作コストは3,000ドルから、手の届きやすい**1,450ドル(約22万円)**へと一気に半減。さらに、重量も14.25kgから8.26kgへと42%もの軽量化に成功し、驚くほどスリムな体躯を手に入れた。これは、低バックラッシュのキャプスタンドライブという独創的な機構で我々の目を釘付けにした初代 CARA:ロープ駆動型ロボット犬の革命 の正統なる後継機だ。

チーム体制で開発されたCARA 2.0は、秒速0.55mの歩行速度を誇り、6.8kgのペイロードを積んで約1時間の稼働が可能だ。チームは当初「1,000ドル以下」という野心的な価格設定を目指していた。最終的な1,450ドルという数字はその目標には届かなかったものの、ホビーレベルでこれほどダイナミックな動きを見せる四足歩行ロボットを実現したことは、賞賛に値する。
このコストダウンの裏には、涙ぐましいエンジニアリングの工夫がある。高価なカーボンファイバー製チューブを3Dプリント構造に置き換え、安価なドローン用モーターを採用。さらに、そのモーターのトルクを3倍に引き出すため、チームは手作業でコイルを巻き直すという力技まで披露している。
なぜこれが重要なのか?
しかし、ここには皮肉な結末が待っていた。プロジェクトが成功を収めたにもかかわらず、Musaはこのロボットのアイデンティティそのものである「技術」の封印を宣言したのだ。
機体名「CARA」は、本来「Capstans Are Really Awesome(キャプスタンはマジで最高だ)」の略称だった。しかし、製作を終えたMusaが辿り着いた結論は、「最高だが、この上なく非実用的」というものだった。彼はプロジェクトの総括として、この設計をリタイアさせ、今後はキャプスタンドライブを採用しないと明言している。その理由はシンプルで、「とにかく組み立てやメンテナンスが地獄だから」だ。
これは、現場で格闘するエンジニアが学ぶ、古典的かつ残酷な教訓である。バックラッシュ・ゼロで高性能という「理論上の美しさ」があっても、構築や維持が困難であれば、実用的なアプリケーションとしては行き止まりになってしまう。Musaは次回の四足歩行ロボットでは「市販のアクチュエータを使う」と語っている。
より安く、より優れたロボット犬を作ることに成功しながらも、その根幹技術が「美しくも欠陥のある前提」だったことを証明してしまった――。エンジニアとしての潔さと、少しの切なさが漂う幕引きとなった。技術的な詳細は、Musaのプロジェクトページで公開されている。