2026年4月9日、米国特許商標庁(USPTO)が公開した**Tesla, Inc.**の最新特許出願には、ニューラルネットワークも、ワールドモデルも、そして「AI」という言葉すら一言も登場しなかった。代わりに、特許番号「US20260097493A1」が執拗なまでのディテールで描き出していたのは、一本の「膝」だった。
テスラの「AI Day 2022」と同日に出願されていたこの書類は、ヒト型ロボットOptimusの背後にある生体模倣(バイオミミクリー)のメカニズムを白日の下にさらしている。公開の数日前、CEOのイーロン・マスクはX(旧Twitter)に「Optimus 3が歩き回っているが、まだいくつかの仕上げが必要だ」と投稿した。彼が言及した「仕上げ」とは、ほぼ間違いなくこの膝の機構を指しているのだろう。
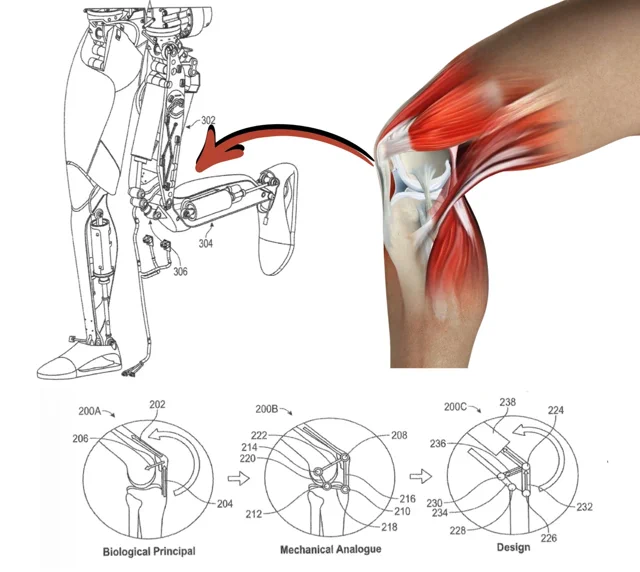
この特許で最も示唆に富んでいるのは、複雑なCAD図面ではなく、3つのパネルで構成されたシンプルなストーリー図だ。まず「生物学的原理(Biological Principle)」とラベル付けされた人間の膝の解剖図から始まり、次に「機械的アナログ(Mechanical Analogue)」としての骨組図、そして最終的な「設計(Design)」へと至る。この文書は、大腿四頭筋、膝蓋骨、そして靭帯が、いかにして「4節リンク機構」へと変換されるかを明確に示している。これは単なるロボットのパーツではない。数百万年にわたる進化の成果を、そのまま機械へと翻訳した結晶なのだ。この設計により、わずか一つの小型リニアアクチュエータで、人間と同等の150度という広大な回転角を実現している。
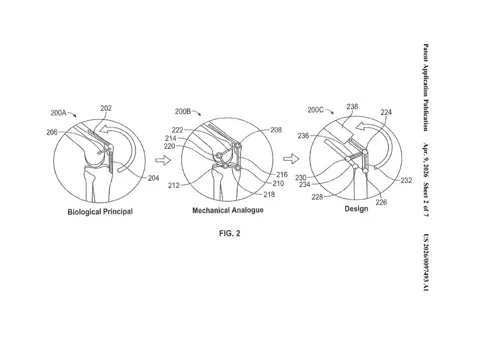
「逆ホーキンス・リンク(inverse Hoecken’s linkage)」を改良したこの機構は、複雑な課題に対する極めてエレガントな解法だ。人間の膝が効率的なのは、単一の支点で回転するのではなく、曲がり具合に応じてレバレッジ(てこの原理)が変化し、最も必要とされる瞬間にトルクを最大化できるからだ。テスラの4節リンクシステムはこの「可変的な機械的利得」を再現しており、小型モーターでありながら、力強く、かつダイナミックな動きを可能にしている。特許内では、トルクと速度の目標値をクリアしつつ、消費電力を最小限に抑えるための最適なリンク長を導き出すために、いかにシミュレーションが駆使されたかが記されている。
なぜこれが重要なのか?
この「膝」こそが、Optimusを手の届く価格にするための鍵を握っている。複雑で電力を食うアセンブリの代わりに、単一の小型アクチュエータを採用することで、テスラは脚一本あたりのコスト、重量、複雑さを劇的に削減した。これは、マスク氏が掲げる「1体あたり2万ドル〜3万ドル(約300万〜450万円)」という野心的な目標価格を達成するために不可欠な要素だ。フリーモント工場では、すでにModel SおよびModel Xの生産を終了してスペースを確保しており、年間100万台という途方もない生産計画を支えるには、こうした徹底的な合理化が欠かせない。
もっとも、この設計は巧妙ではあるが、その幾何学的構造はテスラだけの独占物ではない。アナリストたちは、Xpengの次世代ヒューマノイド「IRON」も、驚くほど似たリンク機構を採用しているようだと指摘している。テスラの設計が2022年のAI Day以降に公知となったことで、業界全体が「最も効率的な設計」へと収束しつつあるようだ。自然界の進化が数百万年かけて導き出した答えに、テスラはコストという制約の中で追いつこうとしている。