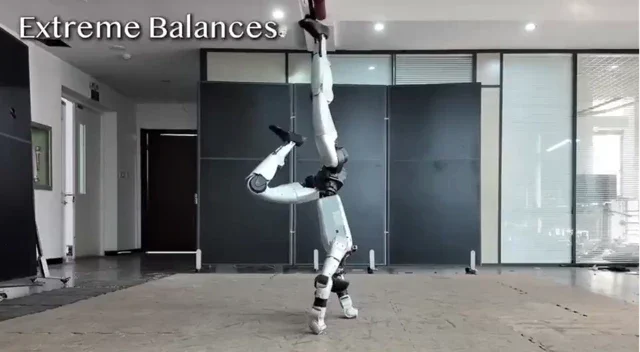
完璧に振り付けられ、どこかぎこちなさが残る従来のロボット・ルーチンとは一線を画す、真に「動ける」ヒューマノイドが登場した。研究チームが発表した汎用AIポリシーOmniXtremeは、ヒューマノイドに連続バック転や不安定な体勢でのバランス保持、さらにはキレのあるブレイクダンスまでをも習得させたのだ。Unitree Roboticsの「G1」を用いて実演されたこの新技術は、2026年の春節ガラ(旧正月番組)で話題をさらったWuBOTのような、特定の動きに特化した「過学習」気味のデモを超え、真の意味で多才なアスリートの領域へと踏み出している。
Unitreeとの共同で進められたこの1年がかりのプロジェクトは、決して平坦な道のりではなかったようだ。研究チームは、汎用的なダイナミック・ムーブメントのコードを解明するために「数十台のG1ロボットを使い潰した」と告白している。G1のエントリー価格が約13,500ドル(約200万円)であることを考えれば、これは強化学習の神に捧げられた、極めて高価なハードウェアの供物と言えるだろう。チームの狙いは、特定の動きをトレースするように訓練されたポリシーと、現実世界のカオスで過酷な物理法則に対応できるポリシーとの間にある、深い溝を埋めることにあった。
その「秘伝のソース」は、2段階のトレーニング手法にある。まず、フローベースの生成制御ポリシーをプリトレーニングし、ロボットに動きの基礎を叩き込む。次に、「アクチュエーションを考慮した残留強化学習(actuation-aware residual RL)」を用いたポストトレーニングを行う。これが決定打となり、実機の複雑なダイナミクスや物理的限界をモデルに反映させることに成功した。研究者らによれば、この第2段階こそが、シミュレーションから現実世界(Sim-to-Real)への移行を成功させる鍵だったという。なお、ロボティクス・コミュニティへの貢献として、モデルのチェックポイントはGitHubで公開されている。
なぜこれが重要なのか?
これほど多岐にわたる高負荷な動作を、単一の統合されたポリシーで実現したことは、大きなマイルストーンだ。これは、一つの派手な芸しかできない「スペシャリスト」から、幅広い身体能力を備えた「ジェネラリスト」へと、ロボット開発のパラダイムがシフトしたことを示唆している。極限のダイナミクスにおけるSim-to-Realの難題をクリアしたOmniXtremeは、より堅牢で適応力が高く、身体能力に優れたヒューマノイド開発のための現実的なフレームワークを提示した。モデルのオープンソース化により、未来の多才なロボット・ジムナストやダンサーの研究は、今後さらに加速することになるだろう。












