精巧なロボットハンド1本に15万ドル(約2,200万円)以上の値がつくことも珍しくないこの分野で、シリコンバレーのスタートアップが、その常識を根底から覆す「究極の選択肢」を提示した。Tesla OptimusやWaymoの基盤モデルチームを率いた精鋭たちが2025年初頭に設立したTetherIA。彼らが発表した「Aero Hand Open」は、わずか314ドル(約4万7,000円)のキットで自作可能な、完全オープンソースのロボットハンドだ。
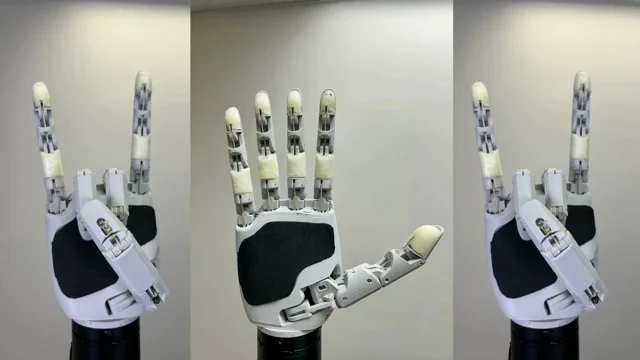
Aero Hand Openは、ロボット工学研究の「参入障壁」を物理的に取り払うべく設計された、5本指の腱駆動(テンドン・ドリブン)型マニピュレータだ。構造体のすべてがナイロン素材の3Dプリントに対応しており、電子部品も汎用品を組み合わせることで、コストを極限まで抑え込んでいる。その軽量な389gのボディには、16の関節と7つの能動的な自由度が凝縮されている。少数のモーターから複数の関節へケーブルで力を伝達する腱駆動方式を採用したことで、滑らかで自然、かつ柔軟な動きを実現した。

ソフトウェア面においても、TetherIAは現代のAI開発を見据えた抜かりない準備を整えている。ROS2システムに完全対応し、独自のPython SDKも提供。さらに物理シミュレータのMuJoCoをサポートしており、NVIDIA Isaac Simへの対応も間近だ。これにより研究者は、高価な実機を動かす前に、シミュレーション上で制御ポリシーの学習やアルゴリズムのベンチマークを徹底的に回すことができる。
なぜこれが重要なのか?
これまで、ロボットによる「器用な操作(デクスタラス・マニピュレーション)」の研究を阻んできた最大のボトルネックは、ハードウェアの法外なコストだった。もちろん、Aero Hand Openが数千万円クラスの産業用マニピュレータと真っ向からスペックを競うわけではない。しかし、この衝撃的な低価格とオープンソースという性質は、この分野を「民主化」させる爆発的なポテンシャルを秘めている。
予算の限られた大学の研究室や教育機関、さらには個人のエンジニアたちに、人間のような「手」を自由に操る機会を提供することで、TetherIAはロボット工学における最大の難問の一つに、コミュニティ全体で挑むための武器を与えたのだ。TeslaやWaymoという、世界最高峰の現場を知り尽くしたチームによるこの一手は、単なるホビープロジェクトではない。ロボット工学のイノベーションを「草の根」から加速させるための、極めて戦略的な一手と言えるだろう。












