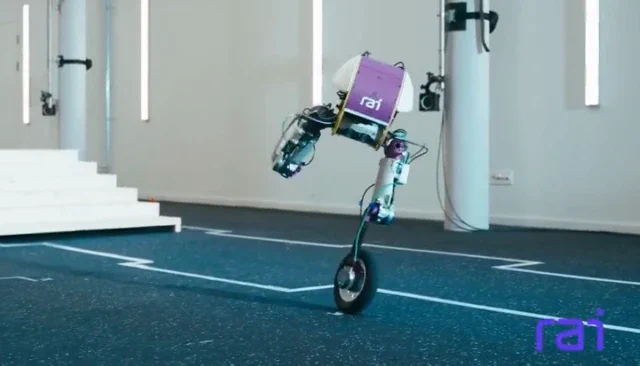
二足歩行ロボットがようやく「まともに歩ける」ようになったと思ったら、Robotics & AI Institute (RAI Institute) がその斜め上を行く答えを提示した。「歩くより、転がったほうが早い」というわけだ。Boston Dynamicsの創業者、Marc Raibert氏が率いる同研究所が公開した最新プロトタイプ、その名もRoadrunner(ロードランナー)。重さわずか15kgのこの軽量ロボットは、足の代わりに「車輪」を装備している。
Roadrunnerは、状況に応じてその姿を自在に変える。車輪を並列にしてスムーズに走行したかと思えば、インラインスケートのような縦一列の構成で俊敏に駆け抜け、段差があれば小さなステップで乗り越える。この変幻自在な動きを支えているのが、前後の区別がない対称的な脚部だ。膝を前後に自在に曲げられる構造が、驚異的な柔軟性を生んでいる。
しかし、真に驚くべきはハードウェアよりもその「脳」にある。RAI Instituteによれば、これらすべての複雑な動きは、たった一つの制御ポリシー(学習モデル)によって管理されているという。地面から立ち上がる、あるいは一本の車輪で危ういバランスを保つといった高度な挙動が、シミュレーションから実機へ「ゼロショット(追加学習なし)」で移植された。つまり、現実世界で初めて動かした瞬間に、微調整なしで完璧に機能したのだ。

シミュレーションから現実への「ゼロショット転送」の成功は、ロボット工学における大きなマイルストーンだ。従来の開発では、仮想空間と現実のわずかな誤差(シム・ツー・リアル・ギャップ)を埋めるために、膨大な時間とコストをかけて実機での微調整を行う必要があった。しかし、Roadrunnerはシミュレーション内で十分に堅牢な知能を獲得したことで、自身のダイナミクスを理解し、学んだスキルを即座に現実世界で発揮できるようになった。
なぜこれが重要なのか?
脚と車輪を組み合わせたハイブリッド型は、決して新しいアイデアではない。かつてBoston Dynamicsが発表した「Handle」もその系譜にある。しかし、Roadrunnerの軽量設計と高度に統合されたAI制御システムは、より実用的でコスト効率の高い未来を指し示している。平地では車輪でエネルギーを節約し、障害物があれば脚で対応する。この「いいとこ取り」は、物流や倉庫内作業といった現場において極めて強力なソリューションになるはずだ。
完全なヒューマノイドが人間のように歩き、走り、バク宙をマスターしようとする一方で、Roadrunnerは別の進化の道を提示している。それは、人間の形を模倣することよりも、俊敏性と効率性を最優先する道だ。一つのAIモデルで多様な移動手段を使いこなす能力は、単なる「器用な芸」ではない。汎用ロボットの開発と社会実装を劇的に加速させる、本質的なブレイクスルーなのだ。












