AIアシスタントと、物理的な腕を操る「デジタル・ポルターガイスト」の境界線が、また一歩、曖昧になった。
SF OpenClaw Hackathonで鮮烈な優勝を飾ったオープンソースプロジェクト「ROSClaw」は、一見シンプルだが極めて野心的な試みを掲げている。それは、画面の中に閉じ込められていたAIエージェントに「肉体」を与えることだ。このプロジェクトは、ロボット開発の標準OSであるROS 2(Robot Operating System)と、現在爆発的な人気を誇るセルフホスト型AIエージェント・プラットフォーム「OpenClaw」を直結させる、待望の架け橋となる。
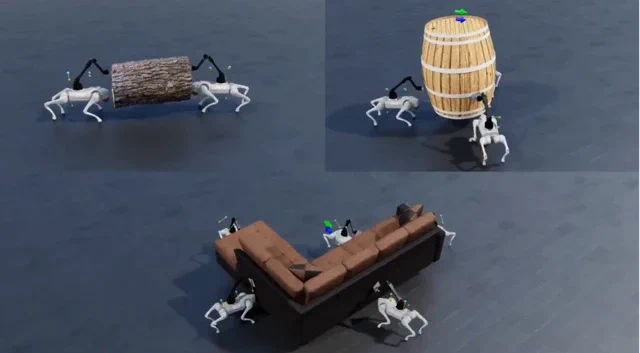
GitHubユーザーのPlaiPin氏率いるチームが開発したROSClawを使えば、OpenClawのエージェントはLinuxやMacからネットワーク上のあらゆるROS 2ロボットを自動検出し、接続することが可能になる。WebRTCによるセキュアかつ極めて低遅延な通信を介して、エージェントはロボットのカメラを通じて世界を「視」て、センサー情報を読み取り、現実世界の物体を掴んだり動かしたりするためのコマンドを発行する。開発チームが「エージェントが画面から脱出した!」と表現するように、これまでカレンダーの予定を管理するだけだったAIが、理論上はデスクの上を片付けることさえ可能になったのだ(もっとも、AI独自の難解なロジックで、さらに散らかされる可能性も否定できないが)。
なぜ、これが重要なのか?
これは単に2つのソフトウェアを繋いだという技術的なトピックに留まらない。次世代の強力なAIに「身体性(Embodiment)」を与えるための、決定的な一石となるからだ。そもそもOpenClawは、単なるチャットボットではない。自らタスクを実行し、ローカルファイルにアクセスし、PC上のアプリケーションを自在に操る、極めて実戦的なオープンソース・フレームワークだ。しかし、これまでのその活躍の場は、あくまでデジタル空間に限定されていた。
ROSClawは、その強力なデジタルな「脳」が物理的な「体」を操作するための、ミッシングリンクを埋める存在だ。広大なROSエコシステムへの門戸を開くことで、何千人ものAI開発者が「物理的な身体を持つAI」の実験に即座に飛び込める環境を整えたのである。自らコードを書き換える能力を持つAIに、物理的なグリッパーの鍵を渡すというのは実に大胆な一手だが、私たちはその先に広がる未来を歓迎したい。プロジェクトの全容は、Apache-2.0ライセンスのもとGitHubで公開されている。