艦隊に3台目のロボットを加える――。それだけでシステム全体が崩壊してしまう。これは、ロボティクス開発に携わるチームの約9割が直面する、あまりに過酷な現実だ。これまで、複数のロボットを協調させるには、中央制御システムへの依存や高帯域幅の通信が不可欠であり、それが技術的なボトルネックとなってきた。しかし、Oregon State Universityの研究チームが発表した最新の設計図は、そんな常識を覆そうとしている。彼らが描くのは、アリの群れのように「沈黙の知性」で連携するロボットたちの未来だ。
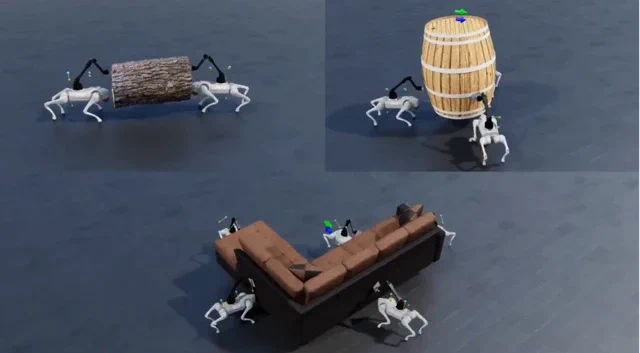
今回発表された論文「decPLM (Decentralized Pinch-Lift-Move)」は、ロボット工学界のコーチェラ・フェスティバルとも言える最高峰のカンファレンス「IEEE International Conference on Robotics and Automation (ICRA) 2026」への採択が決定した。このシステムが画期的なのは、4足歩行ロボットのチームが、Wi-Fiも、マスターノードも、複雑なコマンドのやり取りも一切なしに、丸太やドラム缶、さらにはソファのような巨大で掴みどころのない物体を協力して持ち上げ、運搬できる点にある。ロボットたちは通信する代わりに、自身が抱える物体にかかる力を「感じる」ことで互いの動きを察知する。これは「自己受容感覚(Proprioception)」と呼ばれるアプローチだ。
この魔法を実現したのは、「コンステレーション・リワード(Constellation Reward)」という巧妙な報酬系を用いた共有ポリシーの学習だ。これにより、ロボットたちはまるで荷物にガッチリと固定されているかのように振る舞うよう動機付けられる。この分散型アプローチの真価は、その圧倒的なスケーラビリティにある。シミュレーション上ではわずか2台のロボットで学習させたポリシーが、再学習なしで最大10台のチームにまで適用可能なのだ。これは、エージェントが増えるたびに通信遅延や複雑さに頭を抱えていた従来のマルチロボットシステムのネットワーク問題を、鮮やかに回避している。
なぜこれが重要なのか?
この研究は、「ロボットの数が増えれば問題も増える」というこれまでの定説を真っ向から否定した。decPLMにおいて、ロボットの増加はむしろ「エラーの減少」を意味する。研究チームの実験では、艦隊を2台から10台にスケールアップさせたところ、荷物のトラッキングエラーが80%も激減したという。大規模なチームによる冗長性が個々のミスを自然に相殺し、よりスムーズで精密なオペレーションを可能にしたのだ。
通信という「補助輪」を外すことで、Oregon State Universityは、より堅牢でスケーラブル、そして適応力の高いシステムを作り上げた。これは、物流ロボットの群れを導入する際、ネットワーク構成をゼロから設計し直す必要がなく、単にユニットを追加するだけで済む未来を指し示している。資料が端的に指摘するように、この研究は「ロボティクスのボトルネックはもはやハードウェアの性能ではなく、機械学習(ML)のインフラにある」ことを証明している。
