香港科技大学(HKUST)、IDEA Research、そして**上海人工知能研究所(Shanghai AI Laboratory)**の研究チームが、人型ロボットに複雑な実世界のスキルを「人間の動画を見るだけ」で習得させるフルスタック・フレームワーク、HumanXを発表した。このシステムを使えば、サッカーのドリブルからボクシング、さらには貨物の運搬まで、従来のロボット開発を停滞させていた「タスクごとの緻密な報酬設計(リワード・エンジニアリング)」という泥臭い作業を一切行わずに学習させることが可能になる。
この魔法のようなプロセスの裏側には、人間の動きをロボットの知能へと翻訳する2つの柱がある。まず、XGenと呼ばれるデータ生成パイプラインが、単眼カメラで撮影された人間の動画を解析。その動きを物理的に妥当なインタラクション・データへと合成し、学習効率を高めるためにバリエーションを増幅させる。次に、統一模倣学習フレームワークXMimicがそのデータを用いてロボットのポリシー(行動指針)を訓練し、スキルの習得と汎用化を実現する。この一連の流れは、実機のUnitree G1を用いた「ゼロショット転送(シミュレーションから実機への直接適用)」で見事に証明された。
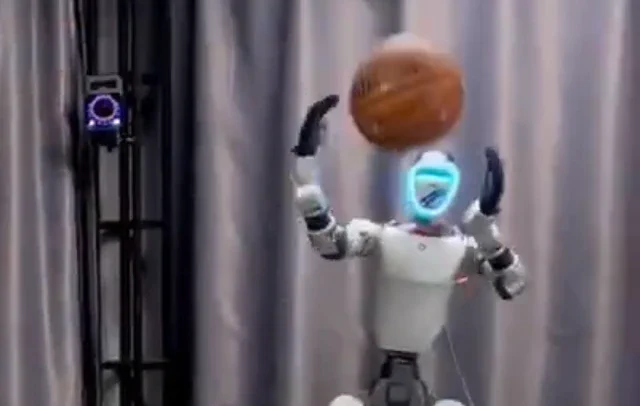
研究論文によれば、この手法は従来のどのアプローチよりも8倍以上高い汎用化成功率を叩き出したという。公開されたデモでは、バスケットボールのポンプフェイクからのジャンプシュートや、人間との継続的なパス回しなど、驚くほどダイナミックで人間らしい動きが披露されている。
なぜこれが重要なのか?
これは、真の「汎用人型ロボット」の実現に向けた決定的な一歩だ。長年、ロボティクスの最大のボトルネックはハードウェアではなくソフトウェア側、つまり「一つ一つの動作をいちいち教え込まなければならない」という、気の遠くなるようなプログラミング工程にあった。
HumanXのようなフレームワークは、そこに過激なショートカットを提示する。YouTubeやTikTokといった、この惑星最大の「物理タスクのデータベース」をそのままロボットの教科書として活用するのだ。報酬設計という専門的な壁を取り払うことで、新たなスキルを開発するハードルは劇的に下がる。エンジニアが「箱を持ち上げる」コードを一行ずつ書く代わりに、倉庫作業員の動画をロボットに見せるだけで済むようになるかもしれない。このパラダイムシフトこそが、SFのコンセプト止まりだった人型ロボットを、ついに実用的なプロダクトへと進化させる鍵となるだろう。












