老犬に新しい芸は教えられない、なんて誰が言った?まあ、今回は犬ではなく、四足歩行ロボットが単なるボール運び以上のことを学んでいるわけだが。カーネギーメロン大学、Google DeepMind、そしてBoschという驚異的なコラボレーションのおかげで、我々の四本足の友はHuman2LocoManというシステムでその腕前を上げている。これは単なる公園の散歩ではない。ロボティクスの未来への飛躍なのだ!
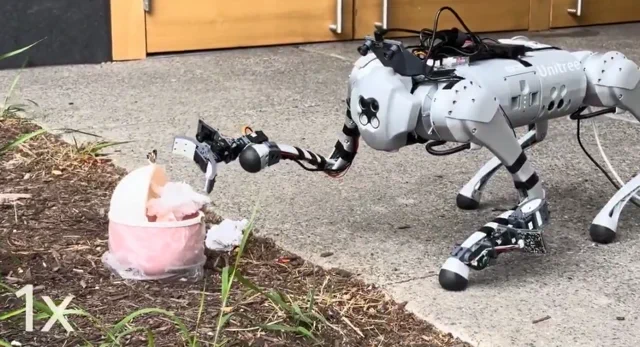
秘訣は?人間のデータだ。ロボットのポリシーを実際のハードウェアで微調整する前に、人間の動作データで事前学習させることで、これらの賢い研究者たちは、単に速くて機敏なだけでなく、物も器用に操作できる四足歩行ロボットを生み出した。ボールを追いかけるだけでなく、それを拾い上げ、おもちゃを片付け、もしかしたら軽い家事までこなすロボット犬を想像してみてほしい。画像には、これらの機械仕掛けの驚異の一つが、地面の物体に触れるために腕を伸ばし、その新たな器用さを示している様子が写っている。
これは単なる見世物ではない。ロボティクスの分野における重要な飛躍だ。Modularized Cross-Embodiment Transformer (MXT)を搭載したHuman2LocoManシステムは、人間とロボット両方のデモンストレーションから学習する。その結果は?必要なロボットデータの50%削減と、不慣れな環境への対応における成功率の目覚ましい80%の向上だ。まるでロボットを「いかに人間らしくなるか」の短期集中コースに送り込み、優等で卒業するのを見ているようなものだ。こんなスキルがあれば、我々はいずれ、これまで不可能だと思っていた仕事に四足歩行ロボットが就くのを目にするかもしれない。ロボ・バリスタはいかがかな?












