クリーンルームの中に潜む「不都合な真実」について話をしよう。ベンチャーキャピタルが二足歩行の奇跡にこぞって出資する一方で、ある残酷な事実が白日の下にさらされようとしている。何十億ドルもの巨額投資にもかかわらず、この新世代ロボットたちが成し遂げた「有用な仕事」の総量は、控えめに言っても四捨五入すればゼロ、単なる誤差の範囲内に過ぎないということだ。
Dynaの共同創業者であるYang Yorkは、最近公開した極めて率直なレポートの中で、このハイプ(過剰な期待)をメスで切り裂いてみせた。彼が描き出したのは、決して美しい絵ではない。ロボットがパルクールを決めたり、卵を繊細に扱ったりする鮮やかなデモ動画のことは一度忘れてほしい。真実は数字の中にあり、それは理想と現実の深刻な乖離を物語っている。2022年から2025年の間に、ロボット産業は180億ドル(約2兆7000億円)以上の資金を吸い上げた。しかし、2026年を迎えた今、現実世界へのインパクトは驚くほど微々たるものだ。
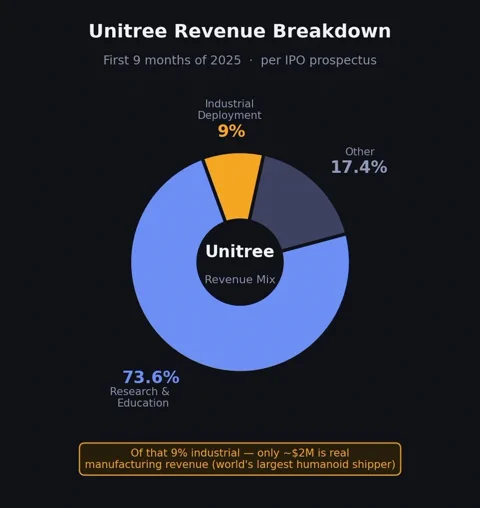
Yorkは、このハードウェア・ブームの象徴的な存在を指差す。TeslaのElon Muskは2026年1月の収支報告で、工場内で実際に役立つ仕事をしているOptimusロボットは「実質的にゼロ」であることを認めた。また、人型ロボットの出荷台数で世界最大手とされるUnitreeが3月のIPO目論見書で明かしたところによれば、売上の73.6%という圧倒的な割合が研究・教育向けだった。実際の産業配備はわずか9%に過ぎず、その大半も「受付やガイド」業務だ。真の製造タスクから得られた収益は、わずか200万ドル程度というお粗末な結果である。
投資家の期待値と物理的な現実の間に横たわるこの深い溝こそが、Yorkの言う「バブル」の正体だ。これは技術がいずれ完成するかどうかという話ではない。タイムラインの問題なのだ。彼はこう表現する。「バブルとは、現在の技術的能力と人間の期待値のギャップに、時間を掛け合わせたものである」
LLMとの安易な比較が招く悲劇
Yorkの主張の核心は、ロボット業界が「質の悪いメタファー」という毒に酔いしれているという点にある。大規模言語モデル(LLM)の指数関数的な成長に目を眩まされた投資家や創業者は、ビット(情報)の世界のプレーブックをアトム(原子)の世界にそのまま適用しようとして、見事に失敗しているのだ。
LLMが光速でスケールできたのは、それが純粋なソフトウェアであり、インターネットを通じて瞬時に何十億人へと配信可能だったからだ。しかし、ロボットは物理的な存在だ。壊れるし、メンテナンスも必要だ。そして何より、現実世界の泥臭く予測不能なカオスの中をナビゲートしなければならない。
もう一つ、同様に欠陥のあるメタファーが「自動運転車(AV)」業界との比較だ。だが、これも当てはまらない。車は自動運転機能がなくても、移動手段としてすでに確立された製品カテゴリーであり、AIによるアップグレードを待つだけの流通チャネルが存在する。対して、知能のないヒューマノイドは、Yorkに言わせれば「28の自由度を持ちながら目的のない、重さ27kgの鉄の塊」に過ぎない。組み込みのユーザーベースもなければ、アップグレードすべき既存の設置台数もない。この業界は、アプリとスマートフォン、そして通信網をすべて同時に構築しようとしているのだ。
つまり、ロボット工学にはLLMのような急上昇カーブは訪れない。AVのようなカーブですら期待できない。そこにあるのは「ロボット工学特有のカーブ」だけであり、業界がこの現実を直視しようとしないことこそが、最も高くつく間違いとなっている。
現代ロボット工学を支える「3つの大いなる欺瞞」
Yorkは、ハイプ・バブルを支えている3つの核心的な誤謬を特定した。これらは、業界が数億ドルの小切手を換金するたびに、自分自身に言い聞かせている「甘い嘘」である。
1. ハードウェアは「チャネル」ではない
最も高くつく誤解は、物理的なロボットを出荷することが、流通チャネルを構築することと同じだと思い込むことだ。「まずは顧客の施設にハードウェアを送り込めば、あとは後からついてくる」という論理だが、これは致命的なミスだ。
真のチャネルとは、継続的な価値を生み出すものを指す。ロボットがデモを披露した後に、投資対効果(ROI)の基準を満たせず埃を被っているのなら、それはチャネルではない。単なる「非常に高価なペーパーウェイト」だ。Yorkは、真のロボティクス・チャネルとは、現場評価、タスク定義、データキャプチャ、リモートデバッグ、そして継続的なアップデートを含む「フルスタックの配備システム」であるべきだと主張する。
「チャネルが機能しているかどうかのテストは、次の配備が前回よりも早くなっているかどうかだ」とYorkは記している。「もしそうでなければ、チャネルを築いたことにはならない。単に在庫とPRのネタを作っただけだ」

2. あなたの「基盤モデル」のほとんどは、ただの「土台」に過ぎない
第二の誤りは、AIモデルがいかにして真に「賢くなる」かについての誤解だ。ロボット工学における議論のほとんどは、膨大なデータセットによる事前学習(プレトレーニング)に終始している。しかし、現代のLLMの真の凄みは事前学習だけではない。事前学習と、ドメイン特化型の事後学習(ポストトレーニング)によるフィードバックの密接な反復ループにある。
ロボット工学において、このループはまだ始まったばかりだ。多くのチームは、能力が自然に開花することを祈りながら、モデルにさらなるデータを無理やり詰め込んでいる。しかし、現実世界の配備からの信号——つまり、ロボットが工場の現場で実際に「失敗」することから得られるフィードバック——がなければ、モデルは成熟できない。LLMの「パープレキシティ(困惑度)」のような、最適化のための統一された指標も存在しない。ラボのベンチマークで満点を取ったモデルも、実際の倉庫の照明の変化に対応できなければ、何の役にも立たないのだ。
3. フライホイールを回すのは「地味な裏方仕事」だ
ここから、スタックの中で最も過小評価されている部分、すなわち「配備インフラ」の話につながる。これは単なる営業活動ではない。一回限りの導入を、再利用可能で複利的に成長する資産へと変えるための、泥臭く華やかさのないエンジニアリング作業だ。リモート診断、データルーティング、信頼性の高いアップデートのためのツール群こそが重要なのだ。
この「フライホイール」がなければ、システム全体が停止する。ロボットは現実の環境に入り込めず、モデルは改善に必要な生データを得られない。いくら計算リソースを投入しても、能力の向上曲線は横ばいになる。Yorkは、バブルの正体は「この構造を理解しているチームと、未だにベンチマークの数字やデモ動画の最適化に明け暮れているチームの間の溝にある」と断じる。
唯一の道は「正面突破」
この現実に直面し、分野は二分されている。一つは**モデル優先(Model-first)派。十分に強力な「脳」があれば問題は解決し、ハードウェアはコモディティ化すると賭けている。もう一つはハードウェア優先(Hardware-first)**派。完璧な肉体こそが鍵であり、オープンソースのソフトウェアがその隙間を埋めると信じている。
YorkとDynaは、第三の陣営である垂直統合(Vertical Integration)を鮮明に打ち出している。彼らがそれを選んだのは、それが流行りだからではない。自社のDYNA-1モデルを1年間配備し続けた結果、それ以外の選択肢は不可能だと悟ったからだ。配備は魔法のように簡単にはならない。研究、ハードウェア、そして現場への配備という全工程で同時にフィードバックループを閉じなければならないことを、彼らは痛いほど学んだのだ。
これこそが、これから取り組むべき仕事だ。バズるデモを追いかけることではない。10回目の配備を、1回目よりも迅速かつ確実にするためのシステムを構築するという、骨の折れるプロセスだ。このコードを真に解読した最初のチームは、単に市場を勝ち取るだけでなく、市場そのものを定義することになるだろう。それまでは、私たちは皆、非常に高価な「科学工作発表会」を眺めているに過ぎない。
