時は2035年。あなたは、300体もの人型ロボットが静かに、そして効率的に立ち働く工場のフロアを監督している。ただ、一つだけ厄介な問題がある。手元には300個の専用リモコンがあり、それらを合体させて巨大なメカスーツを作ろうとしたあなたの試みは、人事部から「労働安全衛生法違反」として繰り返し却下されているのだ。
冗談はさておき、大規模なロボット軍団を管理するというロジスティクスの難題は、自動化された未来における、地味ながらも極めて高いハードルの一つだ。もし、リモコンをガチャガチャ操作する代わりに、ただ「考える」だけでロボットたちが従順に動いてくれるとしたらどうだろうか?
これはSFスリラーの冒頭シーンではない。Kinexusという名の新しいオープンソース・プロジェクトが解決しようとしている現実の課題だ。Elon Musk(イーロン・マスク)率いるNeuralink(ニューラリンク)のような、脳にチップを埋め込む「侵襲型」のブレイン・コンピュータ・インターフェース(BCI)が注目を集める中、Kinexusはより現実的なアプローチをとっている。非侵襲型のEEG(脳波計)ヘッドセットを使用し、ユーザーの思考や音声コマンドを、人型ロボット艦隊へのアクションへと変換するのだ。これは外科手術を伴うインプラントの話ではなく、人間の精神とロボットの労働力をつなぐ、実用的で拡張性の高い「橋」を架ける試みである。
ロボット制御における「スケーラビリティの危機」
工場や倉庫への人型ロボット導入が加速するにつれ、現場は深刻な運用上の課題に直面している。オペレーター1人がロボット1台を操る「1対1」のモデルでは、到底スケールしないのだ。現在の制御方法は、複雑なソフトウェアインターフェースや、個別に直接プログラミングが必要な無骨な「ティーチペンダント」に頼っている。これがボトルネックとなり、ロボットがもたらすべき効率性を阻害しているのが現状だ。数台のロボットならまだしも、数百台を管理するのはロジスティクス上の悪夢でしかない。
ここで重要になるのが、直感的かつ中央集権的なコマンドセンターという概念だ。業界が必要としているのは、物理的資産のための「コントロールプレーン(制御層)」であり、一人の監督者がフリート全体をシームレスに指揮できる方法だ。Kinexusは、最も直感的なユーザーインターフェースは、私たちが生まれ持ったもの、つまり「脳」であると提言している。
Kinexus:脳が新しいダッシュボードになる
Kinexusの本質は、あなたとロボット軍団の間でリアルタイムの通訳として機能する制御ダッシュボードだ。AI開発者のMourad Ouazmourによって開発され、主にPythonで記述されたこのシステムは、工場の自動化における「中枢神経系」となるよう設計されている。市販のEEGヘッドセットから送られてくる脳信号を可視化し、それを個別のコマンドに翻訳。さらに工場全体の環境をマッピングして、状況認識を可能にする。
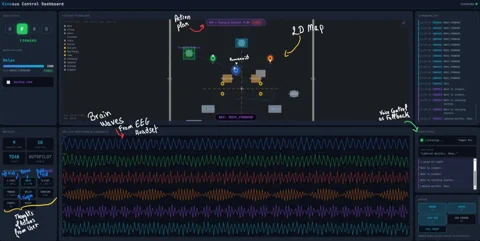
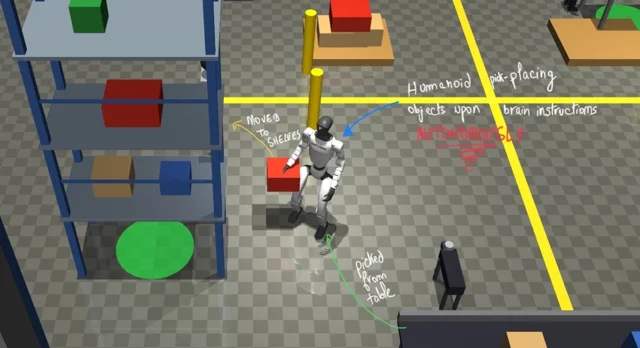
その操作体系は驚くほどダイレクトだ。開発者の解説によれば、ユーザーが右拳を握ればロボットが右を向き、両拳を握れば前進、さらには舌を軽く動かすことでモードを切り替えるといった具合だ。ダッシュボード上では、以下の要素が連動する:
- EEGライブ波形: 脳の電気活動をチャンネルごとに分けたリアルタイムストリーム。
- メソッドパネル: いわば翻訳エンジン。「拳を握るイメージ」などの特定のメンタルキューを、「MOVE_LEFT(左移動)」や「MOVE_FORWARD(前進)」といったロボットのアクションにマッピングする。
- 工場フロアマップ: 各ロボットの位置、ステータス、現在のアクションプランを示す2Dスキマティック。
- ボイス・フォールバック: より複雑な自律タスクの場合、直接的なテレパシー操作をバイパスできる。「コンベアから箱を取ってパレット2に置いて」と指示すれば、指定されたロボットが自律的にルートを計算し、一連の動作を実行する。
SF的な野心と、オープンソースという現実解
非侵襲型EEGによるロボット制御自体は新しい概念ではない。しかし、これを「フリート管理(艦隊管理)」という文脈に持ち込んだ点に、Kinexusの真骨頂がある。これまでのEEG制御の研究は、主に身体障害者の支援や単一ロボットの操作に焦点が当てられており、単純なタスクでの精度は手法によって70%から90%以上に留まっていた。Kinexusは、この技術を研究室から引きずり出し、工場のフロアへ実装しようとしている。
そして、KinexusがGitHubでオープンソースとして公開されたことこそが、最も重要なポイントだ。これにより、高度な制御パラダイムへのアクセスが「民主化」される。これはロボット大手が囲い込むクローズドな製品ではなく、誰でも実験し、拡張し、OpenBCIのようなハードウェアと統合できるツールキットなのだ。信号のノイズ除去やユーザーごとのキャリブレーションといったEEG特有の難題に対し、開発者コミュニティ全体で挑む道が開かれたといえる。
もちろん、GitHubのリポジトリから、思考で制御される活気ある工場が実現するまでには、まだ長い道のりがある。非侵襲型EEGは侵襲型に比べて解像度が低く、産業用途で求められる99%以上の信頼性を達成するのは至難の業だ。しかし、Kinexusが提示しているのは、単なる完成品ではなく「大胆なビジョン」である。
それは、自動化された環境における人間の監督が、必死にボタンを連打することではなく、集中した「戦略的な意図」へと変わる未来だ。今のところ、それは「数百台のロボットを操ることは、ふとした思考と同じくらい簡単になるかもしれない」という、刺激的な未来の断片を見せてくれている。