もしあなたがロボットハンドを作ろうとしたことがあるなら、それがどれほど悪夢のようなエンジニアリングであるか、骨身に染みていることだろう。人間の手のような繊細で、しかもあらゆる形状に対応できる把持能力を再現することは、ロボット工学における「ラスボス」とも言える究極の難題だ。主要な課題は、単に関節の数を増やすことではない。それは、すべての関節点に重く電力食いのモーターを必要とせずとも、不規則な形状の物体に適合できるシステムをいかに生み出すか、という点にある。これまでのほとんどの設計は、現実世界では硬すぎ、複雑すぎ、あるいは脆すぎたのだ。
そこに颯爽と現れたのが、Teslaだ。最近公開された特許出願(WO2024/073138A1)は、Optimus Gen 2ハンドの設計哲学のベールを剥がし、その容赦ない効率性において、まさに「達人の技」を見せつけている。Teslaのエンジニアたちは、複雑さを追求する代わりに、巧妙な物理法則、堅牢なメカニズム、そして「デモ用じゃない、量産を見据えて作られたんだ!」と叫んでいるかのような設計思想に深く傾倒している。
アンダーアクチュエートの妙技
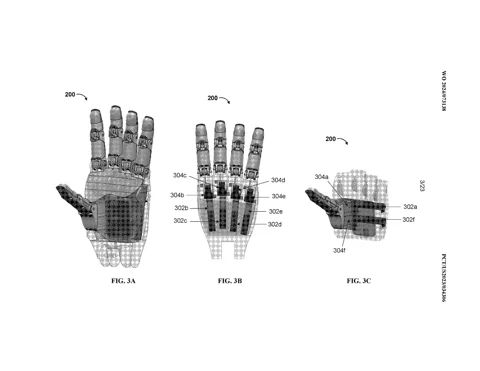
Teslaの設計の核心は、「アンダーアクチュエート」システムにある。これは、関節の総数よりも少ない数のモーターを使用するコンセプトだ。Optimusハンドの場合、6つのアクチュエーターが11の関節(親指に2つ、残りの4本の指にそれぞれ1つ)を駆動する。これは、生体腱のように機能するケーブル駆動システムによって実現されている。各指には1本のケーブルが通っており、これを引くと、関節が自然で連続的な動きで曲がるのだ。
このアプローチが、適応性の問題を鮮やかに解決する。関節が硬く、あらかじめ決められた経路に強制されることがないため、指は電動ドリルであろうとデリケートな卵であろうと、対象物の形状に受動的に適合できる。これは、複雑な把持計算をソフトウェアからハードウェア自体にオフロードする、まさに「機械的知性」の一形態と言えるだろう。
しかし、Teslaのエンジニアたちは、ここに決定的なひねりを加えた。各指の根元の関節にあるトーションスプリングは、指先のそれよりも意図的に硬く設計されているのだ。これにより、弱い指先の関節が最初に曲がって対象物を包み込み、次に強い根元の関節がそれに続くという「受動的知性」が生まれる。ロボットの中央プロセッサが頭を悩ませる必要もなく、自動的に確実な「包み込むような」把持が保証されるわけだ。
ウォームドライブ:重い荷物を「タダ」で保持する裏技
特許にひっそりと隠された、おそらく最も輝かしいエンジニアリングの粋は、アクチュエーターにウォームギアとウォームホイール伝達機構を使用している点だろう。これは単にモーターの回転をケーブルの牽引力に変えるだけではない。効率性にとって計り知れない意味を持つ、まさに「物理学のハック」だ。
ウォームドライブは通常、「逆駆動不能(ノンバックドライバブル)」である。高い摩擦とギア歯の急な角度のため、出力側のウォームホイールが入力側のウォームギアを回すことはできない。ロボットにとって、これはスーパーパワーだ。Optimusが重い物体を掴むと、ギアが機械的にそのグリップを固定する。するとモーターは完全にリラックスでき、電力消費ゼロで重量を保持するのだ。常に重力に逆らってエネルギーを消費しなければならない直接駆動のハンドと比較すると、これはバッテリー寿命と熱管理にとって記念碑的な勝利と言えるだろう。
このセットアップはまた、単一のコンパクトなステージで massive な減速比を提供し、小型の高速モーターが骨を砕くような把持力を生み出しつつ、手のひらの中にすっきりと収まることを可能にしている。
現実世界のために構築:耐久性と精度
紙の上では素晴らしいデザインも、たった千回のサイクルで壊れてしまえば何の役にも立たない。この特許からは、長期的な信頼性に対する深い執着が読み取れる。
ケーブル駆動システムにおける最大の故障ポイントの一つは、ケーブルの疲労と伸びだ。Teslaはこれを2つの巧妙な解決策で対処している。
- 凸型曲面ハック: ケーブルが関節で急激に曲がるのを防ぐため、指のリンク間に滑らかな凸型曲面が成形されている。これにより、ケーブルは安全な半径で曲がることを余儀なくされ、その寿命を劇的に延ばす。
- 自動テンショナー: 指先内部には、ケーブルの端を常に引っ張るスプリング式のメカニズムが埋め込まれている。これにより、ケーブルが時間の経過とともに伸びても、緩みを自動的に解消し、手は手動メンテナンスなしで何年もの間、タイトで反応性の高い状態を保つ。
センサーについては、Teslaはかさばる、故障しやすい機械式センサーを巧みに回避した。代わりに、各関節のピボット周りに永久リング磁石が統合されている。静止したホール効果センサーが、関節の回転に伴う磁場の変化を測定し、精密で摩擦がなく、摩耗のない角度検出を提供する。この非接触アプローチは、数百万サイクルにわたってサブミリメートルの精度を維持するために不可欠なのだ。
手以上のもの、それは哲学
特許の難解な専門用語を読み解くと、明確な全体像が浮かび上がる。Teslaは実験室の好奇の対象を構築しているのではない。混沌として予測不可能な現実世界での量産と展開を意図した製品を設計しているのだ。逆駆動不能なギアから自動テンショナー付きの腱に至るまで、すべての決定は効率性、耐久性、そして製造可能性のために最適化されている。
他のヒューマノイドロボットがより多くの自由度や、より異質なアクチュエーターを誇るかもしれないが、Optimusハンドは、ロボットによる操作という核心的な問題を、最もシンプルで最も堅牢な方法で解決することに焦点を当てた、実用的なアプローチを代表している。それは、現実世界では、信頼性と効率性が常に派手な複雑さに勝ることを理解したデザインだ。そして、その一点こそが、この設計をこれほどまでに魅力的にしているのだ。
