Il segreto inconfessabile della robotica moderna è che la maggior parte delle demo più impressionanti sono solo spettacoli di marionette ad alta tecnologia. Un esercito di operatori umani, imbrigliati in complessi e costosi sistemi di teleoperazione, guida a distanza ogni mossa di un robot per generare i dati necessari a insegnargli qualcosa di utile. È un processo lento, costoso e, francamente, non scalabile. I dottorandi di Stanford Tony Zhao e Cheng Chi di Sunday AI hanno osservato questo “vicolo cieco di scalabilità” e hanno deciso di saltarlo a piè pari.
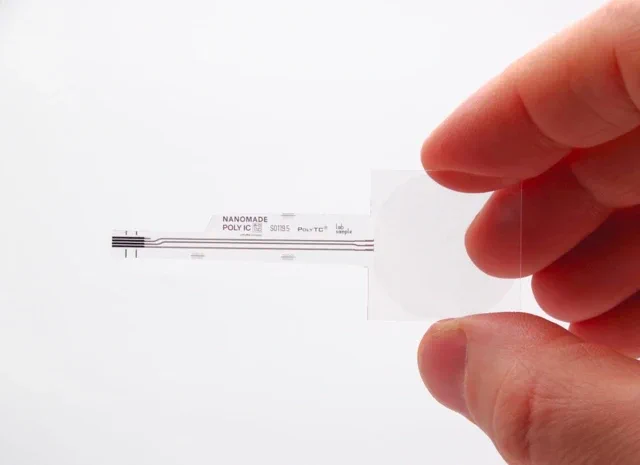
La loro soluzione, che alimenta un nuovo modello di fondazione chiamato ACT-1, è ingannevolmente semplice: se vuoi che un robot impari un compito, fallo tu stesso. Invece di un sistema di teleoperazione da 20.000 €, gli ingegneri di Sunday utilizzano un “Guanto per l’Acquisizione delle Abilità” (Skill Capture Glove) da 200 €. Questo guanto, co-progettato per corrispondere alla geometria e ai sensori della mano del loro robot Memo, cattura i dati sottili e ricchi di contatto del movimento umano. La premessa è audace: se un umano può farlo indossando il guanto, il robot può impararlo, senza bisogno di alcun burattinaio.
Il Collo di Bottiglia dei Dati e la Soluzione del Guanto
La convinzione fondamentale di Sunday è che la robotica non sia frenata dall’hardware, dalla potenza di calcolo o dai finanziamenti, ma da un unico e definitivo vincolo: i dati. Mentre i Large Language Models possono ingerire l’intera internet, la robotica non dispone di un corpus simile di dati di interazione nel mondo reale. Aziende come Tesla possono sfruttare milioni di auto per la raccolta dati, ma le startup di robotica non godono di questo lusso. La teleoperazione è stata la risposta del settore, ma è un approccio di forza bruta, sia ad alta intensità di capitale che lento.

Lo Skill Capture Glove è l’elegante stratagemma di Sunday per aggirare questo problema. Decentralizzando la raccolta dei dati, chiunque, ovunque, può contribuire al set di addestramento senza la necessità di un robot fisico presente. Ciò offre due vantaggi chiave:
- Efficienza del Capitale: Sunday afferma che il guanto è due ordini di grandezza più economico rispetto a una configurazione di teleoperazione standard, riducendo drasticamente il costo dell’acquisizione dei dati.
- Qualità dei Dati: Per compiti che si basano sul “tatto”—come determinare la forza necessaria per piegare un calzino o posizionare un bicchiere da vino nella lavastoviglie—il guanto fornisce un feedback di forza naturale che la teleoperazione remota semplicemente non può replicare.
Questo approccio permette a Sunday di acquisire dati da centinaia di case disordinate e reali, costruendo un dataset che riflette la “coda lunga della vita quotidiana”, come la chiamano loro—gatti nelle lavastoviglie e tutto il resto.
Dalla Tavola al Lavastoviglie
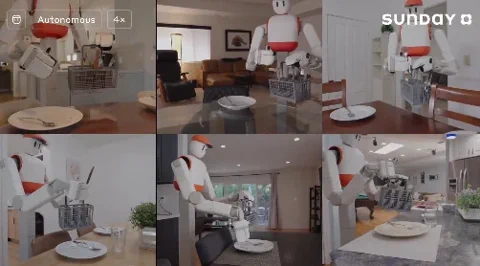
Per mettere alla prova la tempra di ACT-1, Sunday ha presentato quella che definisce “il compito più complesso mai eseguito autonomamente da un robot”: sgomberare una tavola e caricare una lavastoviglie. Non si tratta solo di prendere e posizionare. Il compito prevede 33 interazioni destre uniche e 68 totali con 21 oggetti diversi—dai delicati bicchieri da vino trasparenti ai piatti in ceramica e alle posate metalliche.
Durante questo compito a lungo termine, il robot Memo naviga per oltre 39 metri (circa 130 piedi), smaltisce i residui di cibo e persino aziona la lavastoviglie. È una sinfonia di manipolazione finissima e navigazione su scala ambientale, controllata da un singolo modello end-to-end. Il co-fondatore Tony Zhao ammette di aver mandato in frantumi un sacco di bicchieri durante lo sviluppo, ma ha gestito zero rotture in oltre 20 demo dal vivo, una testimonianza della sensibilità acquisita dal modello.
Generalizzazione Zero-Shot nel Mondo Reale
Un robot che funziona solo nel suo laboratorio è solo un progetto scientifico. Per dimostrare l’adattabilità di ACT-1, il team ha dispiegato Memo in sei Airbnb sconosciuti. L’obiettivo: sgomberare la tavola e caricare la lavastoviglie con zero addestramento specifico per l’ambiente.
Condizionando il modello su mappe 3D durante l’addestramento, ACT-1 impara a interpretare nuovi layout anziché memorizzarne di specifici. Quando viene inserito in una nuova casa, utilizza la mappa fornita per navigare verso posizioni chiave, dimostrando una capacità cruciale per qualsiasi robot destinato al caos di una casa reale. Ad oggi, ACT-1 è il primo modello di fondazione a combinare questo livello di manipolazione a lungo termine con la navigazione condizionata dalla mappa.
Spingere i Confini della Destrezza
Oltre al compito “maratona” della lavastoviglie, Sunday sta anche mettendo in mostra la finezza di ACT-1 con due sfide notoriamente difficili: piegare i calzini e preparare un caffè espresso. Mentre altri robot hanno piegato oggetti grandi e prevedibili, i calzini sono un incubo di deformabilità e auto-occlusione. ACT-1 identifica con successo i calzini appaiati da un mucchio disordinato, li arrotola usando movimenti multi-dito e li deposita in un cesto.
Azionare una macchina da caffè espresso, nel frattempo, dimostra una combinazione di precisione millimetrica e forza bruta. Il robot esegue una pressatura a mezz’aria, inserisce il portafiltro e genera l’elevata coppia necessaria per bloccarlo prima di premere il pulsante. Queste non sono solo dimostrazioni appariscenti; sono prove attentamente selezionate dei dati di alta qualità e ricchi di sfumature che lo Skill Capture Glove può fornire.
L’approccio di Sunday è una scommessa audace. Puntando tutto su un metodo innovativo di raccolta dati, ha aggirato il più grande collo di bottiglia del settore e ha prodotto un modello con capacità sorprendenti. Il robot su ruote Memo potrebbe non avere il fascino da fantascienza di un umanoide bipede, ma la sua intelligenza pratica è innegabile. Sunday ha silenziosamente lanciato il guanto di sfida, suggerendo che il futuro della robotica potrebbe non essere costruito da burattinai, ma semplicemente mostrando a un robot come si fa.