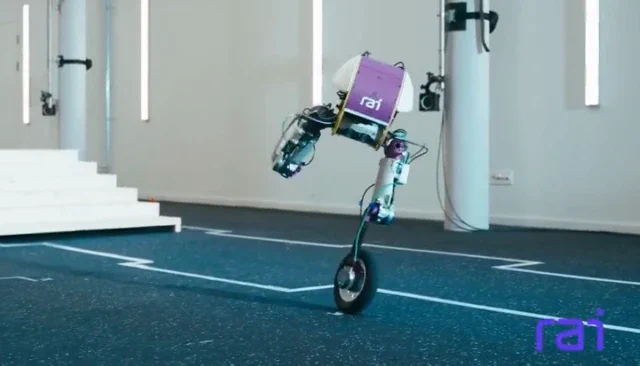
अगर आपको लग रहा था कि दो पैरों वाले रोबोट्स ने आखिरकार इंसान की तरह चलना सीख लिया है, तो Robotics & AI Institute (RAI Institute) के पास आपके लिए कुछ अलग है। Boston Dynamics के फाउंडर Marc Raibert की अगुवाई वाली इस रिसर्च संस्था ने अपना नया प्रोटोटाइप Roadrunner पेश किया है। यह महज 15 किलोग्राम (33 lb) का एक हल्का-फुल्का रोबोट है, जिसने पैरों के बजाय पहियों का रास्ता चुना है। यह मशीन लोकोमोशन (गतिशीलता) का एक बेहतरीन नमूना पेश करती है—यह कभी पहियों पर कार की तरह दौड़ती है, कभी स्केटिंग करने लगती है, और ज़रूरत पड़ने पर बाधाओं को पार करने के लिए छोटे-छोटे कदम भी उठा सकती है।
इस रोबोट के पैर पूरी तरह सिमेट्रिकल हैं और घुटनों से आगे या पीछे, दोनों तरफ मुड़ सकते हैं, जो इसे गजब का लचीलापन देते हैं। लेकिन असली जादू इसकी हार्डवेयर बनावट में नहीं, बल्कि इसके ‘दिमाग’ में है। RAI Institute के मुताबिक, Roadrunner की इन सभी जटिल मूवमेंट को संभालने के लिए सिर्फ एक सिंगल कंट्रोल पॉलिसी को ट्रेन किया गया है। इसका नतीजा यह हुआ कि ज़मीन से उठकर खड़े होना या एक अकेले पहिए पर संतुलन बनाना जैसे मुश्किल काम, फिजिकल रोबोट पर “zero-shot” तरीके से काम कर गए। यानी, बिना किसी एक्स्ट्रा सेटिंग या सुधार के, यह पहली ही बार में बिल्कुल सटीक चला।

सिमुलेशन (Virtual world) से असल दुनिया (Real world) में यह “zero-shot transfer” रोबोटिक्स की दुनिया में एक बड़ा मील का पत्थर है। इससे रोबोट को ट्रेन करने में लगने वाला समय और पैसा, दोनों ही काफी कम हो जाते हैं। आमतौर पर वर्चुअल ट्रेनिंग और असल दुनिया के बीच के अंतर को पाटने के लिए इंजीनियरों को महीनों मशक्कत करनी पड़ती है। लेकिन एक मज़बूत AI पॉलिसी बनाकर RAI Institute ने Roadrunner को इस काबिल बना दिया है कि वह अपनी डायनेमिक्स को खुद समझे और सीखी हुई स्किल्स को तुरंत ज़मीन पर उतार सके।
आखिर यह इतना अहम क्यों है?
पैरों और पहियों का यह हाइब्रिड कॉन्सेप्ट कोई एकदम नया नहीं है—Boston Dynamics के ही ‘Handle’ रोबोट ने सालों पहले इसकी झलक दिखाई थी। हालांकि, Roadrunner का हल्का डिजाइन और इसका एडवांस, यूनिफाइड AI कंट्रोल सिस्टम एक ऐसे भविष्य की ओर इशारा करता है जहाँ ये मशीनें सस्ती और ज़्यादा व्यावहारिक होंगी। समतल सतहों पर पहियों की रफ़्तार और ऊबड़-खाबड़ रास्तों पर पैरों की ताकत का मेल, इन्हें लॉजिस्टिक्स और गोदामों (warehouses) के लिए एकदम परफेक्ट बनाता है।
जहाँ एक तरफ पूरी तरह इंसानी दिखने वाले (Humanoid) रोबोट चलने, दौड़ने और बैकफ्लिप मारने की कला में माहिर हो रहे हैं, वहीं Roadrunner विकास का एक अलग रास्ता दिखा रहा है। यह एक ऐसा रास्ता है जहाँ इंसान की नकल करने के बजाय फुर्ती (agility) और कार्यकुशलता (efficiency) को प्राथमिकता दी गई है। एक ही AI मॉडल से कई तरह की चालों में महारत हासिल करना सिर्फ एक ‘कूल’ ट्रिक नहीं है; यह एक बुनियादी बदलाव है जो भविष्य के रोबोट्स को असल दुनिया में तैनात करना कहीं ज़्यादा आसान बना देगा।












