अपनी टीम में तीसरा रोबोट जोड़ना कागजों पर तो आसान लगता है, लेकिन हकीकत यह है कि दुनिया की 90% रोबोटिक्स टीमों के लिए यह किसी डरावने सपने से कम नहीं है। मल्टी-रोबोट कोआर्डिनेशन की पेचीदगियां, सेंट्रलाइज्ड कंट्रोलर्स पर उनकी निर्भरता और हाई-बैंडविड्थ कम्यूनिकेशन की जरूरत हमेशा से इस राह का सबसे बड़ा रोड़ा रही हैं। लेकिन Oregon State University के रिसर्चर्स ने अब एक ऐसी भविष्य की नींव रख दी है, जहाँ रोबोट्स की टीमें किसी चींटियों की कॉलोनी की तरह बिना एक शब्द बोले, गजब के तालमेल के साथ काम करेंगी।
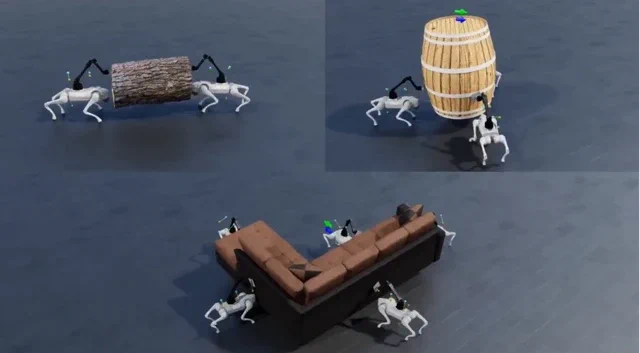
उनका नया रिसर्च पेपर, decPLM (Decentralized Pinch-Lift-Move), रोबोटिक्स की दुनिया के सबसे प्रतिष्ठित मंच IEEE International Conference on Robotics and Automation (ICRA) 2026 के लिए चुन लिया गया है—इसे आप रोबोटिक्स की दुनिया का ‘कान्स फिल्म फेस्टिवल’ या ‘ग्रैमी अवॉर्ड्स’ समझ सकते हैं। यह सिस्टम चार पैरों वाले (quadruped) रोबोट्स को इस काबिल बनाता है कि वे भारी-भरकम और बेडौल चीजों, जैसे लकड़ी के लट्ठे, बैरल और यहाँ तक कि सोफे को भी मिलकर उठा सकें। सबसे चौंकाने वाली बात? इसके लिए उन्हें आपस में एक बिट का भी डेटा शेयर करने की जरूरत नहीं है। न कोई मास्टर नोड, न Wi-Fi का झंझट और न ही कमांड्स का अंतहीन सिलसिला। यहाँ सारा तालमेल ‘एहसास’ पर टिका है। रोबोट्स केवल अपने इंटरनल सेंसर्स (जिसे proprioception कहते हैं) के जरिए उस दबाव और बल (force) को महसूस करते हैं जो सामान उठाते समय उन पर पड़ता है, और उसी के आधार पर अपनी चाल ढाल लेते हैं।
इस तकनीक की असली जादूगरी इसके “Constellation Reward” सिस्टम में छिपी है। यह एक ऐसी ट्रेनिंग पॉलिसी है जो रोबोट्स को इस तरह काम करने के लिए उकसाती है जैसे वे उस सामान का ही हिस्सा हों जिसे वे उठा रहे हैं। यह डिसेंट्रलाइज्ड अप्रोच न केवल असरदार है, बल्कि बेहद स्केलेबल भी है। इस पॉलिसी को सिमुलेशन में सिर्फ दो रोबोट्स के साथ ट्रेन किया गया था, लेकिन यह बिना किसी दोबारा ट्रेनिंग के 10 रोबोट्स की टीम के साथ भी उतनी ही सटीकता से काम करती है। इसने उस नेटवर्किंग की समस्या को जड़ से खत्म कर दिया है जहाँ ज्यादा रोबोट्स का मतलब होता था—नेटवर्क पर बढ़ता बोझ और काम में देरी (latency)।
आखिर यह इतना महत्वपूर्ण क्यों है?
यह रिसर्च उस पुरानी धारणा को सिरे से खारिज करती है कि “जितने ज्यादा रोबोट, उतनी ज्यादा मुसीबत।” decPLM के साथ मामला बिल्कुल उल्टा है: यहाँ जितने ज्यादा रोबोट होंगे, गलती की गुंजाइश उतनी ही कम होगी। रिसर्चर्स ने पाया कि जब टीम को 2 से बढ़ाकर 10 रोबोट्स का किया गया, तो सामान ले जाने की सटीकता (tracking error) में 80% का भारी सुधार देखा गया। बड़ी टीम होने का फायदा यह है कि अगर कोई एक रोबोट छोटी गलती करता भी है, तो बाकी रोबोट्स उसे आपस में ही बैलेंस कर लेते हैं, जिससे पूरा ऑपरेशन बेहद स्मूथ हो जाता है।
कम्यूनिकेशन की बैसाखी को हटाकर, Oregon State ने एक ऐसा सिस्टम तैयार किया है जो न केवल मजबूत है, बल्कि किसी भी माहौल में ढलने के लिए तैयार है। यह उस भविष्य की ओर इशारा है जहाँ लॉजिस्टिक्स रोबोट्स की एक पूरी फौज खड़ा करना उतना ही आसान होगा जितना कि ग्रुप में एक नया रोबोट जोड़ना, बिना पूरे नेटवर्क को दोबारा डिजाइन किए। जैसा कि इस रिसर्च के मूल सारांश में स्पष्ट कहा गया है, “अब रोबोटिक्स की दुनिया में बाधा हार्डवेयर की काबिलियत नहीं, बल्कि हमारा ML Infrastructure है।”












