हार्डवेयर की दुनिया में अपनी तिजोरियों पर कुंडली मारकर बैठने वाले इंजीनियरों के होश उड़ने वाले हैं। Roboparty ने अपने Roboto_Original बाईपेडल (दो पैरों वाले) रोबोट का फुल-स्टैक सोर्स कोड और हार्डवेयर ब्लूप्रिंट्स पूरी दुनिया के लिए सार्वजनिक कर दिए हैं। कंपनी का कहना है कि यह कदम इंडस्ट्री के उस “सीक्रेट सॉस” वाले कल्चर पर सीधा प्रहार है, जहाँ हर छोटी बात गोपनीय रखी जाती है। रोबोपार्टी का अनुमान है कि इस ओपन-सोर्स मॉडल की बदौलत नई टीमों के लिए डेवलपमेंट का खर्च 80% तक कम हो जाएगा।
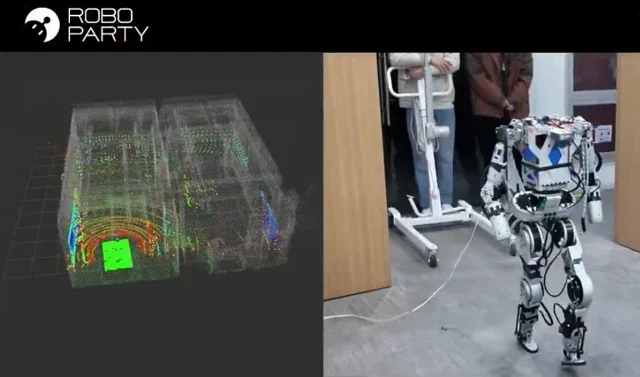
यह सिर्फ कुछ मामूली CAD फाइलों का पुलिंदा नहीं है; Roboparty ने अपनी पूरी तकनीक की ‘पोल’ खोल दी है। इस रिलीज में स्ट्रक्चरल ड्रॉइंग्स, इलेक्ट्रॉनिक बिल ऑफ मैटेरियल्स (EBOMs), सप्लायर्स की लिस्ट और उनके खास AMP मोशन कंट्रोल एल्गोरिदम तक सब कुछ शामिल है। यह बॉट खुद में एक पावरहाउस है—इसकी ऊँचाई 1.2 मीटर है, वज़न 30 किलोग्राम है और यह 3 मीटर/सेकंड (करीब 11 किमी/घंटा) की प्रभावशाली रफ़्तार से दौड़ सकता है। इसका डिज़ाइन ऑटोमोटिव-ग्रेड स्ट्रक्चर और मॉड्यूलर जॉइंट्स पर आधारित है, जो यह साबित करता है कि ओपन-सोर्स हार्डवेयर भी परफॉर्मेंस के मामले में किसी से कम नहीं है। डेवलपर्स के लिए इसमें SMPL-X मॉडल का सपोर्ट भी दिया गया है, ताकि इंसानी मोशन कैप्चर डेटा का इस्तेमाल करके रोबोट की चाल (gait training) को आसानी से सुधारा जा सके।
यह इतना महत्वपूर्ण क्यों है?
एक हाई-परफॉर्मेंस बाईपेडल प्लेटफॉर्म को ओपन-सोर्स करके, Roboparty उस पुरानी समस्या को खत्म करना चाहती है जिसे हम “पहिए का दोबारा आविष्कार” (reinventing the wheel) कहते हैं। सालों से रोबोटिक्स का क्षेत्र बिखरा हुआ था, जहाँ अनगिनत टीमें बेसिक लोकोमोशन और हार्डवेयर की चुनौतियों को सुलझाने में ही करोड़ों डॉलर और कीमती समय बर्बाद कर देती थीं।
यह पहल एक साझा बुनियादी ढांचा (shared infrastructure) प्रदान करती है। अब रिसर्चर्स और स्टार्टअप्स को बुनियादी काम के लिए सिर खपाने की ज़रूरत नहीं होगी; वे सीधे असली दुनिया की समस्याओं को सुलझाने और नई उपयोगिताएँ खोजने पर ध्यान दे सकेंगे, बजाय इसके कि वे सिर्फ “दिखावटी स्टंट” वाले वीडियो बनाएँ। अगर यह प्रयोग सफल रहा, तो यह एक ऐसे सहयोगी ईकोसिस्टम को जन्म दे सकता है जो ‘एम्बॉडीड इंटेलिजेंस’ (embodied intelligence) के पूरे क्षेत्र को रॉकेट की रफ़्तार दे देगा।
जो लोग रोबोटिक्स के भविष्य को अपने हाथों से कोड करना चाहते हैं, उनके लिए पूरा प्रोजेक्ट GitHub पर उपलब्ध है और साथ में विस्तृत डॉक्यूमेंटेशन भी दिया गया है।












