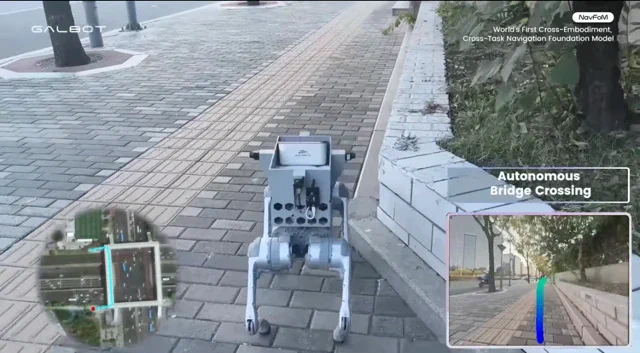
Shanghai Jiao Tong University और SenseTime Research के रिसर्चर्स ने हाल ही में एक वीडियो जारी कर दुनिया को NavFm से रूबरू कराया है। इसे “दुनिया का पहला क्रॉस-एम्बॉडीमेंट (cross-embodiment), क्रॉस-टास्क नेविगेशन फाउंडेशन मॉडल” कहा जा रहा है। अगर आम बोलचाल की भाषा में कहें, तो वे एक ऐसा ‘यूनिवर्सल नेविगेशन ब्रेन’ तैयार कर रहे हैं जिसे सैद्धांतिक रूप से किसी भी रोबोट में फिट किया जा सकता है, ताकि वह बिना किसी से टकराए एक जगह से दूसरी जगह पहुँच सके। इस डेमो वीडियो में एक रोबोटिक कुत्ता (quadruped) शहरी बाधाओं के बीच अपनी महारत दिखाता नज़र आ रहा है।

यह रोबोटिक कुत्ता भीड़-भाड़ में लोगों से बड़ी फुर्ती से बचकर निकलता है, विजुअल डिस्ट्रैक्शंस के बावजूद अपने टारगेट पर नज़रें टिकाए रखता है और यहाँ तक कि खुद ही मल्टी-स्टेज डिलीवरी टास्क भी पूरे करता है। मिशन मिलते ही, यह रोबोट खुद-ब-खुद पुलों, फुटपाथों और सीढ़ियों को पार करते हुए अपनी मंजिल तक पहुँचने का रास्ता बना लेता है। यह सब वाकई प्रभावशाली है, जो एनवायरनमेंटल अवेयरनेस (पर्यावरण की समझ) और टास्क-बेस्ड पाथफाइंडिंग के उस स्तर को दर्शाता है जो साधारण रिमोट कंट्रोल या पहले से तय किए गए रास्तों से कहीं आगे की बात है। बेशक, किसी डेमो वीडियो के साफ-सुथरे रास्तों पर नेविगेट करना एक बात है और असल शहरी जीवन की अफरा-तफरी का सामना करना दूसरी—यह एक ऐसा सबक है जो कई ऑटोनॉमस डिलीवरी व्हीकल्स काफी कड़वे अनुभवों से सीख रहे हैं। चीन के रोबो-वैन: न कंक्रीट का खौफ, न मोटरसाइकिल की परवाह
यह इतना महत्वपूर्ण क्यों है?
यहाँ सबसे अहम शब्द हैं “फाउंडेशन मॉडल” और “क्रॉस-एम्बॉडीमेंट”। हर नए रोबोट के लिए नेविगेशन लॉजिक को शुरू से प्रोग्राम करने की कड़ी मेहनत के बजाय, एक फाउंडेशन मॉडल ऐसी ‘जनरलाइज्ड इंटेलिजेंस’ (सामान्य बुद्धिमत्ता) प्रदान करता है जिसे किसी भी रूप में ढाला जा सकता है। इसे ऐसे समझिए जैसे हर कार मॉडल के लिए अलग इंजन बनाने के बजाय एक ऐसा ‘यूनिवर्सल GPS’ बना दिया जाए जो किसी भी गाड़ी में लगा देने पर उसे रास्ता दिखा सके। अगर NavFm के दावे सही साबित होते हैं, तो यही कोर मॉडल जो इस रोबोटिक कुत्ते को रास्ता दिखा रहा है, मामूली बदलावों के साथ किसी पहियों वाले ड्रोन या ह्यूमनॉइड (humanoid) रोबोट को भी गाइड कर सकेगा। यह तकनीक रोबोटिक्स के डेवलपमेंट टाइम को काफी कम कर सकती है और असल मायने में ‘जनरल-पर्पस रोबोट्स’ बनाने की दिशा में एक बड़ा कदम साबित हो सकती है, जो किसी भी शरीर और वातावरण में खुद को ढाल सकें।












