कहते हैं कि पुराने कुत्ते को नए करतब सिखाना नामुमकिन है, लेकिन इस मामले में हम किसी कुत्ते की नहीं, बल्कि एक चार पैरों वाले रोबोट की बात कर रहे हैं जो अब सिर्फ चीज़ें लाने (fetch) से कहीं ज़्यादा सीख रहा है। Carnegie Mellon University, Google DeepMind और Bosch के बीच हुए एक क्रांतिकारी सहयोग की बदौलत, हमारे ये चार पैरों वाले ‘मैकेनिकल दोस्त’ Human2LocoMan नाम के सिस्टम के साथ एक नई ऊंचाई छू रहे हैं। यह सिर्फ पार्क में टहलने जैसा साधारण काम नहीं है; यह रोबोटिक्स की दुनिया में भविष्य की ओर एक लंबी छलांग है!
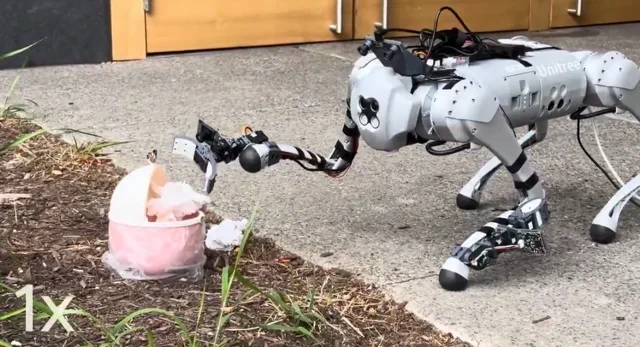
इस कामयाबी का असली नुस्खा क्या है? जवाब है—इंसानी डेटा (Human data)। असली हार्डवेयर पर बारीकियों को सुधारने (fine-tuning) से पहले, इन समझदार शोधकर्ताओं ने रोबोट की ‘पॉलिसी’ को इंसानी हरकतों पर प्री-ट्रेन (pretrain) किया है। नतीजा? एक ऐसा quadruped रोबोट जो न केवल तेज़ और फुर्तीला है, बल्कि चीज़ों को बड़ी नज़ाकत और कुशलता के साथ हैंडल भी कर सकता है। ज़रा कल्पना कीजिए, एक रोबोटिक कुत्ता जो न सिर्फ बॉल के पीछे भाग सकता है, बल्कि उसे उठा सकता है, अपने खिलौनों को सलीके से रख सकता है और शायद घर के छोटे-मोटे काम भी निपटा सकता है। तस्वीरों में यह मैकेनिकल अजूबा अपने रोबोटिक हाथ (arm) को फैलाकर ज़मीन पर रखी चीज़ों के साथ तालमेल बिठाता दिख रहा है, जो इसकी नई ‘डेक्सटेरिटी’ (dexterity) या कार्य-कुशलता का जीता-जागता सबूत है।
यह महज़ कोई दिखावे का करतब नहीं है, बल्कि रोबोटिक्स के क्षेत्र में एक बहुत बड़ी उपलब्धि है। Modularized Cross-Embodiment Transformer (MXT) द्वारा संचालित Human2LocoMan सिस्टम, इंसान और रोबोट दोनों के प्रदर्शन से सीखता है। इसका परिणाम हैरान करने वाला है: रोबोटिक डेटा की ज़रूरत में 50% की कमी आई है और अनजान वातावरण में काम करने की सफलता दर (success rate) में 80% का ज़बरदस्त सुधार देखा गया है। यह कुछ ऐसा है जैसे आपने अपने रोबोट को “इंसान कैसे बनें” के किसी क्रैश कोर्स पर भेजा हो और वह वहां से टॉप करके निकला हो। कौन जानता है, इस तरह की महारत के साथ, हम जल्द ही इन चार पैरों वाले रोबोट्स को उन भूमिकाओं में देख सकते हैं जिनके बारे में हमने कभी सोचा भी नहीं था। क्या आप एक ‘रोबो-बरिस्ता’ से अपनी सुबह की कॉफी लेना पसंद करेंगे?












