Añadir un tercer robot a tu flota no debería ser el fin del mundo, pero para el 90% de los equipos de robótica, esa es la cruda realidad. La complejidad de la coordinación multi-robot, con su dependencia de controladores centralizados y un ancho de banda masivo, ha sido históricamente el gran cuello de botella del sector. Sin embargo, investigadores de la Oregon State University acaban de publicar la hoja de ruta hacia un futuro donde los equipos de robots se coordinan con la inteligencia silenciosa y emergente de una colonia de hormigas.
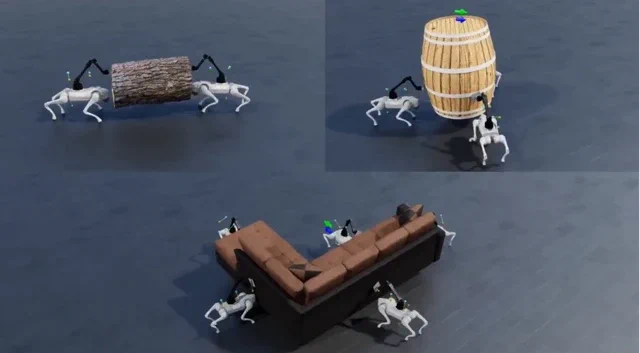
Su nuevo estudio, decPLM (Decentralized Pinch-Lift-Move), ha sido aceptado en la IEEE International Conference on Robotics and Automation (ICRA) 2026, lo que en el mundo de la robótica equivale a ser el cabeza de cartel en el Primavera Sound. El sistema permite que un equipo de robots cuadrúpedos con brazos mecánicos levanten y transporten de forma cooperativa objetos pesados y difíciles de agarrar —como troncos, barriles o incluso un sofá— sin intercambiar ni un solo bit de información entre ellos. Olvidaos de nodos maestros, redes Wi-Fi o el envío frenético de comandos a nivel de articulación. En su lugar, la coordinación surge puramente de los robots “sintiendo” las fuerzas ejercidas sobre el objeto que transportan, utilizando únicamente sus propios sensores internos; un concepto conocido como propiocepción.
La magia reside en una política compartida entrenada mediante un ingenioso sistema de “Recompensa de Constelación” (Constellation Reward), que incentiva a los robots a actuar como si estuvieran rígidamente anclados a la carga. Este enfoque descentralizado es sorprendentemente eficaz y escalable. Aunque la política se entrenó utilizando solo dos robots en simulación, es capaz de generalizarse a equipos de hasta diez integrantes sin necesidad de reentrenamiento. Esto esquiva las pesadillas habituales de conectividad que lastran a los sistemas multi-robot, donde añadir más agentes suele derivar en una latencia y una complejidad inasumibles.
¿Por qué es esto importante?
Esta investigación le da la vuelta a un dogma establecido: la idea de que más robots equivalen a más problemas. Con decPLM, más robots significan, de hecho, menos errores. El equipo descubrió que, a medida que la flota escalaba de dos a diez robots, el error de seguimiento de la carga caía en un asombroso 80%. La redundancia de un equipo más grande compensa de forma natural los fallos individuales, logrando una operación mucho más fluida y precisa.
Al eliminar la muleta de la comunicación constante, Oregon State ha creado un sistema intrínsecamente más robusto, escalable y adaptable. Nos señala un futuro donde desplegar un enjambre de robots logísticos será tan sencillo como añadir una unidad más al grupo, sin tener que rediseñar toda la arquitectura de red. Como sentencia el material original sin andarse con rodeos: este trabajo confirma que “el cuello de botella en la robótica ya no es la capacidad del hardware, sino la infraestructura de ML”.












