On April 9, 2026, the US Patent and Trademark Office published a Tesla, Inc. filing that almost no one was waiting for. Patent US20260097493A1 is twenty pages long, names Senior Mechanical Engineer Rod Jafari as its sole inventor, and describes a knee. There are no neural networks, no world models, no self-driving claims. Just two link members, one linear actuator, and four pivots arranged in a particular way to make a humanoid walk without breaking the bank.
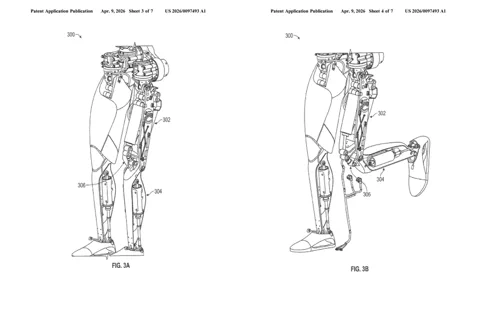
The application was filed on September 30, 2022, the same day Tesla held its second AI Day and showed off its “Bumble-C” prototype. That night, an engineer described the robot’s knee as a “four-bar link joint” inspired by human biology. Three and a half years later, the US patent record finally caught up. This is almost certainly the knee that walks on “Optimus 3,” which CEO Elon Musk mentioned was walking around in a late-March 2026 post on X. The patent’s most revealing feature isn’t the final design, but the diagram that shows how they got there.
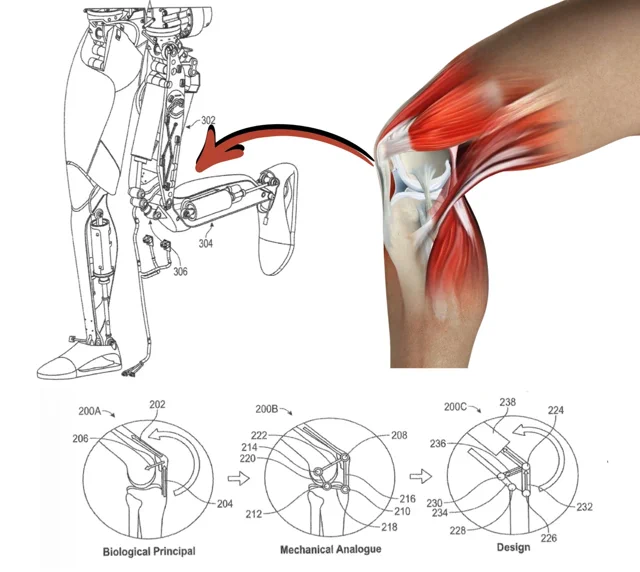
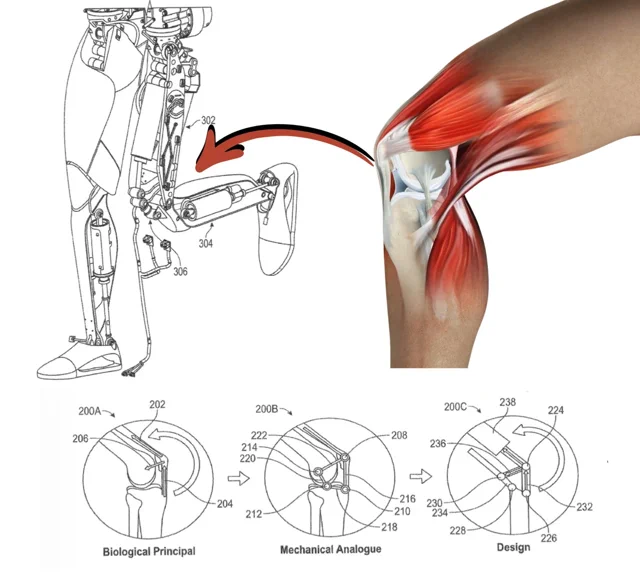
Patent FIG. 2 is a three-panel origin story, moving from a “Biological Principle” (a human knee), through a “Mechanical Analogue” (an abstract linkage), to the final “Design.” It’s rare for a patent to lay out its reasoning so plainly. The drawing effectively states: the reason this thing is shaped the way it is is because we copied something that already works exceptionally well. The mechanism, a modified inverse Hoecken’s linkage, mimics the human knee to achieve a massive ~150° range of motion from a single, small actuator.
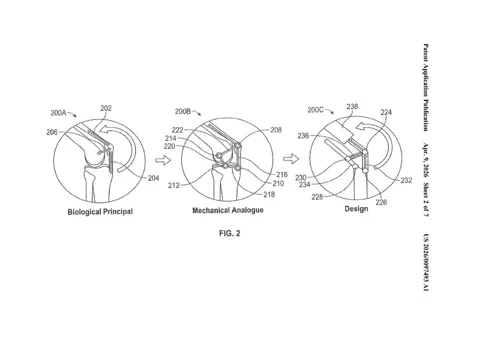
The biological knee is a marvel of efficiency. The kneecap (patella) acts as a moving pulley, changing the leverage of the quadriceps muscle to deliver maximum torque exactly when it’s needed most during a walking stride. The joint also doesn’t pivot on a single point; its center of rotation moves, a geometric trick managed by the cruciate ligaments which function, mechanically, as a four-bar linkage. Tesla’s patent borrows these two properties—a moving lever arm and a non-fixed pivot—to create a joint that is brutally efficient. The patent notes that a small, 60-degree rotation from the actuator translates into a huge angular sweep for the lower leg.
Why is this important?
This isn’t just clever engineering; it’s the key to manufacturing humanoids at scale. The entire design philosophy detailed in the patent is about cost reduction. A single linear actuator is cheaper, lighter, and simpler than a multi-motor joint. Its power efficiency means a smaller, lighter battery, further reducing the robot’s overall mass and cost. When your stated goal is to sell Optimus for $20,000–$30,000, every gram and every dollar saved on a joint gets multiplied by millions of production units.
This is the kind of hard-nosed engineering that makes Tesla’s plan to replace Model S and Model X production lines at its Fremont factory with an Optimus production line seem slightly less insane. The design itself isn’t entirely unique; analysts have noted that Xpeng’s next-generation IRON humanoid, unveiled in late 2025, uses a strikingly similar modified inverted Hoecken linkage in its knee. However, with Tesla’s design having been public since its 2022 AI Day, this appears to be a case of convergent evolution toward an optimal solution rather than imitation.
Evolution had millions of years to perfect the geometry. Tesla has to get there on a budget, and fast. This patent is a glimpse into how it plans to pull it off.