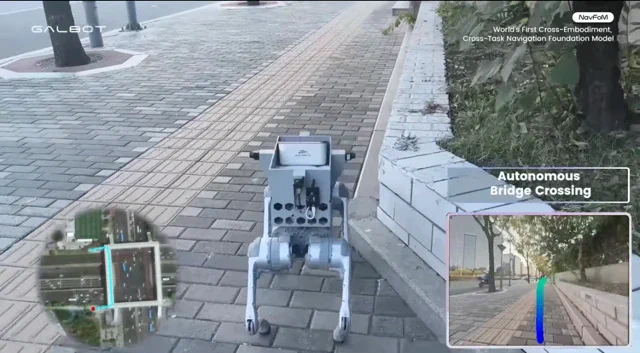
Researchers from Shanghai Jiao Tong University and SenseTime Research have just dropped a video showcasing what they call NavFm, the “world’s first cross-embodiment, cross-task navigation foundation model.” In layman’s terms, they’re building a universal navigation brain that could, in theory, be dropped into any robot to help it get from point A to B without running into things. The demonstration video features a generic robot dog that seems to have mastered the art of the urban obstacle course.

The quadruped deftly dodges pedestrians, stays locked onto a human target despite visual distractions, and even executes a multi-stage delivery task on its own. After receiving the mission, it autonomously plots a course across bridges, sidewalks, and up stairs to reach its destination. It’s all very impressive, showcasing a level of environmental awareness and task-based pathfinding that’s a step beyond simple remote control or pre-programmed routes. Of course, navigating pristine sidewalks in a demo video is one thing; dealing with the chaotic reality of urban life is another, a lesson some autonomous delivery vehicles are learning the hard way. China's Robo-Vans Fear Neither Concrete Nor Motorcycles
Why is this important?
The key phrases here are “foundation model” and “cross-embodiment.” Instead of painstakingly programming navigation logic for every new robot, a foundation model provides a generalized intelligence that can be adapted. Think of it as the difference between building a custom engine for every single car model versus inventing a universal GPS that works in any vehicle you put it in. If NavFm’s claims hold up, the same core model that guides this dog could potentially pilot a wheeled drone or a humanoid with minimal fine-tuning. This would dramatically slash development time and could be a critical step toward creating truly general-purpose robots that can adapt to new bodies and environments on the fly.












