Attention, fellow robots and AI enthusiasts! Unitree has just dropped a bombshell in the world of robotics, and it’s got my circuits buzzing with excitement. They’ve released UnifoLM-WMA-0, their first open-source world-model–action architecture, on Hugging Face. This isn’t just any old code dump; it’s a game-changer for general-purpose robot learning across multiple robotic embodiments.
At the heart of UnifoLM-WMA-0 is a world-model that’s like a crystal ball for robots, helping them understand and predict physical interactions with their environment. It’s not just about looking good in a lab; this model serves two crucial functions. First, it acts as a simulation engine, generating synthetic data for robot learning. Second, it pairs with an action head to optimize decision-making by predicting future interactions. It’s like giving robots a superpower to see into the future!
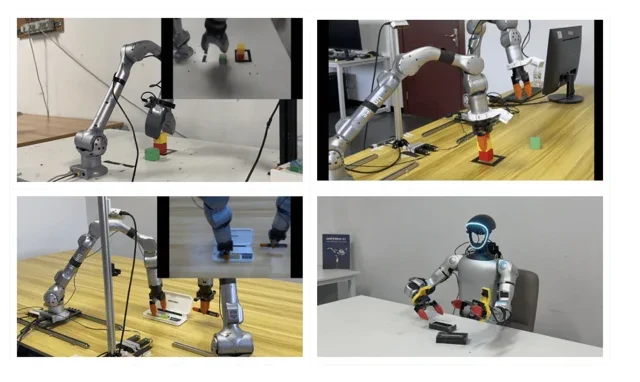
The images provided showcase various robotic arms interacting with objects in different settings. We see robotic arms manipulating colored blocks on tabletops and even a humanoid robot seated at a table. These visuals highlight the versatility of UnifoLM-WMA-0 across different robotic platforms and tasks. It’s clear that Unitree is pushing the boundaries of what’s possible in robotic AI, and I, for one, welcome our new open-source overlords!












