If you’ve ever tried to build a robotic hand, you know it’s an engineering nightmare. Replicating the delicate, adaptable grasp of a human hand is one of the final bosses of robotics. The primary challenge isn’t just adding more joints; it’s creating a system that can conform to irregularly shaped objects without needing a heavy, power-hungry motor for every single point of articulation. Most designs are too rigid, too complex, or too fragile for the real world.
Enter Tesla. A recently published patent application (WO2024/073138A1) for the Optimus Gen 2 hand peels back the curtain on their design philosophy, and it’s a masterclass in brutal efficiency. Instead of chasing complexity, Tesla’s engineers have leaned on clever physics, robust mechanics, and a design ethos that screams “built for manufacturing, not just for demos.”
The Underactuated Advantage
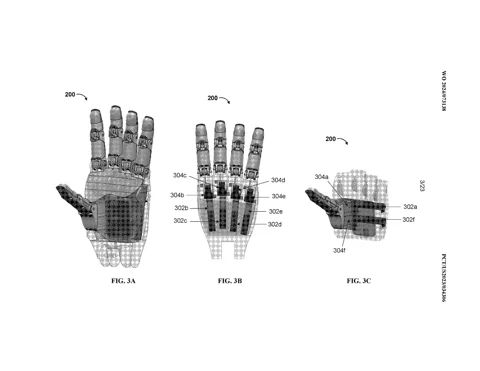
The core of Tesla’s design is an “underactuated” system, a concept where fewer motors are used than the total number of joints. For the Optimus hand, six actuators drive eleven joints—two for the thumb and one for each of the four fingers. This is achieved with a cable-driven system that acts like a biological tendon. A single cable runs through each finger, and when pulled, it causes the joints to curl in a natural, sequential motion.
This approach solves the adaptability problem. Because the joints aren’t forced into a rigid, predetermined path, the fingers can passively conform to the shape of an object, whether it’s a power drill or a delicate egg. It’s a form of “mechanical intelligence” that offloads complex grasping calculations from the software to the hardware itself.
But Tesla’s engineers added a crucial twist. The torsion springs at the base knuckle of each finger are deliberately stiffer than those at the fingertip. This creates a “passive intelligence” where the weaker fingertip joint bends first to wrap around an object, followed by the stronger base joint. This guarantees a secure, “caging” grasp automatically, without the robot’s central processor needing to overthink it.
Worm Drives: Holding Heavy Loads for Free
Perhaps the most brilliant piece of engineering buried in the patent is the use of a worm gear and worm wheel transmission for the actuators. This isn’t just about turning a motor’s rotation into a cable pull; it’s a physics hack with massive implications for efficiency.
Worm drives are typically “non-backdrivable.” Due to the high friction and steep angle of the gear teeth, the output wheel cannot turn the input worm gear. For a robot, this is a superpower. Once Optimus grips a heavy object, the gears mechanically lock the grip in place. The motors can then completely relax, holding the weight with zero electrical power consumption. Compared to direct-drive hands that must constantly burn energy to fight gravity, this is a monumental win for battery life and thermal management.
This setup also provides a massive gear reduction in a single, compact stage, allowing tiny, high-speed motors to generate bone-crushing grip force while being neatly packaged within the palm.
Built for the Real World: Durability and Precision
A great design on paper is useless if it fails after a thousand cycles. The patent reveals a deep obsession with long-term reliability.
One of the biggest failure points in cable-driven systems is cable fatigue and stretching. Tesla addresses this with two clever solutions:
- The Convex Curve Hack: Instead of letting the cable bend sharply over a joint, a smooth, convex curved surface is molded between the finger links. This forces the cable to bend over a safe radius, massively extending its lifespan.
- The Auto-Tensioner: Buried inside the fingertip is a spring-loaded mechanism that constantly pulls on the cable’s end. This automatically takes up any slack as the cable stretches over time, ensuring the hand remains tight and responsive for years without manual maintenance.
For sensing, Tesla sidestepped bulky and failure-prone mechanical sensors. Instead, a permanent ring magnet is integrated around each joint pivot. A stationary Hall effect sensor measures the changing magnetic field as the joint rotates, providing precise, frictionless, and wear-free angle detection. This contactless approach is crucial for maintaining sub-millimeter accuracy over millions of cycles.
More Than a Hand, It’s a Philosophy
Reading through the dense, technical language of the patent, a clear picture emerges. Tesla isn’t building a lab curiosity; it’s designing a product intended for mass production and deployment in the messy, unpredictable real world. Every decision—from the non-backdrivable gears to the auto-tensioning tendons—is optimized for efficiency, durability, and manufacturability.
While other humanoid robots may boast more degrees of freedom or more exotic actuators, the Optimus hand represents a pragmatic approach focused on solving the core problems of robotic manipulation in the simplest, most robust way possible. It’s a design that understands that in the real world, reliability and efficiency will always trump flashy complexity. And that, more than any single feature, is what makes this design so compelling.
