Špinavé tajemství moderní robotiky je, že většina působivých demonstrací jsou jen high-tech loutkové divadlo. Armáda lidských operátorů, připoutaných ke složitým a drahým teleoperačním soupravám, na dálku řídí každý pohyb robota, aby generovali data potřebná k tomu, aby se robot naučil cokoli užitečného. Je to pomalý, drahý a upřímně řečeno, neškálovatelný proces. Bývalí studenti doktorandského programu ze Stanfordu Tony Zhao a Cheng Chi ze společnosti Sunday AI se podívali na tento „škálovací pat“ a rozhodli se ho zcela přeskočit.
Jejich řešení, které pohání nový základní model zvaný ACT-1, je klamně jednoduché: pokud chcete, aby se robot naučil úkol, prostě ho udělejte sami. Místo teleoperační soupravy za 20 000 dolarů používají inženýři ze Sunday „Rukavici pro zachycení dovedností“ za 200 dolarů. Tato rukavice, navržená tak, aby odpovídala geometrii a senzorům ruky jejich robota Memo, zachycuje jemná, kontaktně bohatá data lidského pohybu. Předpoklad je odvážný: pokud to člověk dokáže v rukavici, robot se to může naučit, bez nutnosti loutkového divadla.
Úzké hrdlo dat a řešení v podobě rukavice
Základní přesvědčení Sunday je, že robotiku nebrzdí hardware, výpočetní výkon ani finance, ale jediné, zásadní omezení: data. Zatímco velké jazykové modely dokázaly pohltit celý internet, robotika nemá takový korpus dat o interakcích z reálného světa. Společnosti jako Tesla mohou využít miliony aut pro sběr dat, ale robotické startupy takový luxus nemají. Teleoperace byla odpovědí průmyslu, ale je to přístup hrubé síly, který je náročný na kapitál a pomalý.

Rukavice pro zachycení dovedností je elegantní řešení Sunday, jak obejít tento problém. Decentralizací sběru dat může k tréninkové sadě přispět kdokoli a kdekoli, aniž by byl fyzicky přítomen robot. To přináší dvě klíčové výhody:
- Kapitálová efektivita: Sunday tvrdí, že rukavice je o dva řády levnější než standardní teleoperační sestava, což dramaticky snižuje náklady na sběr dat.
- Kvalita dat: U úkolů, které se spoléhají na cit – jako je určení síly potřebné k složení ponožky nebo usazení vinné sklenice do myčky nádobí – rukavice poskytuje přirozenou haptickou zpětnou vazbu, kterou vzdálená teleoperace jednoduše nemůže replikovat.
Tento přístup umožňuje Sunday sbírat data ze stovek chaotických domácností v reálném světě a budovat datovou sadu, která odráží „dlouhý ocas života“, jak to sami nazývají – kočky v myčkách nádobí a všechno, co k tomu patří.
Od jídelního stolu k myčce nádobí
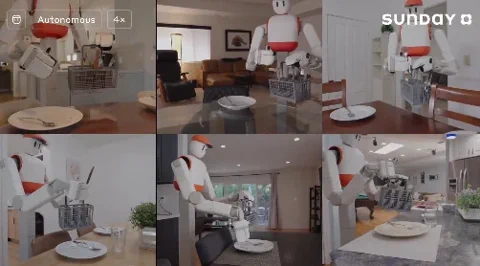
Aby Sunday dokázala, co v ACT-1 dříme, předvedla to, co nazývá „nejsložitějším úkolem, jaký kdy robot autonomně provedl“: úklid jídelního stolu a naložení myčky nádobí. Tohle není jen zvedání a pokládání. Úkol zahrnuje 33 jedinečných a celkem 68 obratných interakcí s 21 různými předměty – od křehkých, průhledných vinných sklenic po keramické talíře a kovové příbory.
Během tohoto dlouhodobého úkolu robot Memo urazí přes 40 metrů, vysype zbytky jídla a dokonce ovládá myčku nádobí. Je to symfonie jemné manipulace a navigace v měřítku místnosti, řízená jediným end-to-end modelem. Spoluzakladatel Tony Zhao přiznává, že během vývoje rozbili spoustu sklenic, ale během více než 20 živých demonstrací se jim podařilo nerozbít ani jednu, což svědčí o naučené citlivosti modelu.
Zero-shot generalizace v divočině
Robot, který funguje jen ve vlastní laboratoři, je jen vědecký projekt. Aby dokázal ACT-1 svou přizpůsobivost, tým nasadil robota Memo do šesti neznámých Airbnb bytů. Cíl: uklidit stůl a naložit myčku nádobí bez jakéhokoli tréninku specifického pro dané prostředí.
Podmíněním modelu 3D mapami během tréninku se ACT-1 učí interpretovat nová uspořádání, namísto memorování konkrétních. Když je „vhozen“ do nového domu, použije dodanou mapu k navigaci na klíčová místa, což demonstruje klíčovou schopnost pro každého robota určeného pro chaos skutečného domova. K dnešnímu dni je ACT-1 prvním základním modelem, který kombinuje tuto úroveň dlouhodobé manipulace s navigací podmíněnou mapou.
Posouvání hranic obratnosti
Kromě maratonského úkolu s myčkou nádobí Sunday také předvádí jemnost ACT-1 ve dvou notoricky obtížných výzvách: skládání ponožek a příprava espressa. Zatímco jiné roboty složily velké, předvídatelné předměty, ponožky jsou noční můrou deformovatelnosti a samo-zakrytí. ACT-1 úspěšně identifikuje páry z neuspořádané hromady, svine je do klubíčka pomocí vícefingerových pohybů a uloží je do koše.
Ovládání kávovaru, mezitím, demonstruje kombinaci milimetrové přesnosti a hrubé síly. Robot provede „tampování“ ve vzduchu, vloží portafiltr a vyvine vysoký točivý moment potřebný k jeho zajištění před stisknutím tlačítka. Nejsou to jen efektní dema; jsou to pečlivě vybrané důkazy vysoce kvalitních, nuancovaných dat, která může Rukavice pro zachycení dovedností poskytnout.
Přístup Sunday je odvážná sázka. Sázkou všeho na novou metodu sběru dat obešla největší úzké hrdlo v odvětví a vytvořila model s překvapivými schopnostmi. Kolečkový robot Memo sice nemusí mít sci-fi přitažlivost bipedálního humanoida, ale jeho praktická inteligence je nepopiratelná. Sunday tiše hodila rukavici, naznačujíc, že budoucnost robotiky možná nebude postavena loutkaři, ale jednoduše tím, že robotovi ukážeme, jak se to dělá.